This is my attempt at building a really good obstacle avoidance robot. The robot is built to drive around a normal indoor environment without getting stuck on stuff. The robot uses an Arduino Maga 2560 and several sonar sensors to detect obstacles.
This robot also has a Raspberry Pi and camera module, that will be used for computer vision experiments in the future.
I made a simple DIY clock based on Arduino. It uses a RCT module with battery backup, and a serial 7-segment LED display. More information including code, schematic and STL file download are available here: Arduino clock page
I have created a small and simple balancing robot. It uses a single Arduino, an MPU-6050 and stepper motors. All the design files, code and schematic are available for download. Read more here: Mini balancing robot page
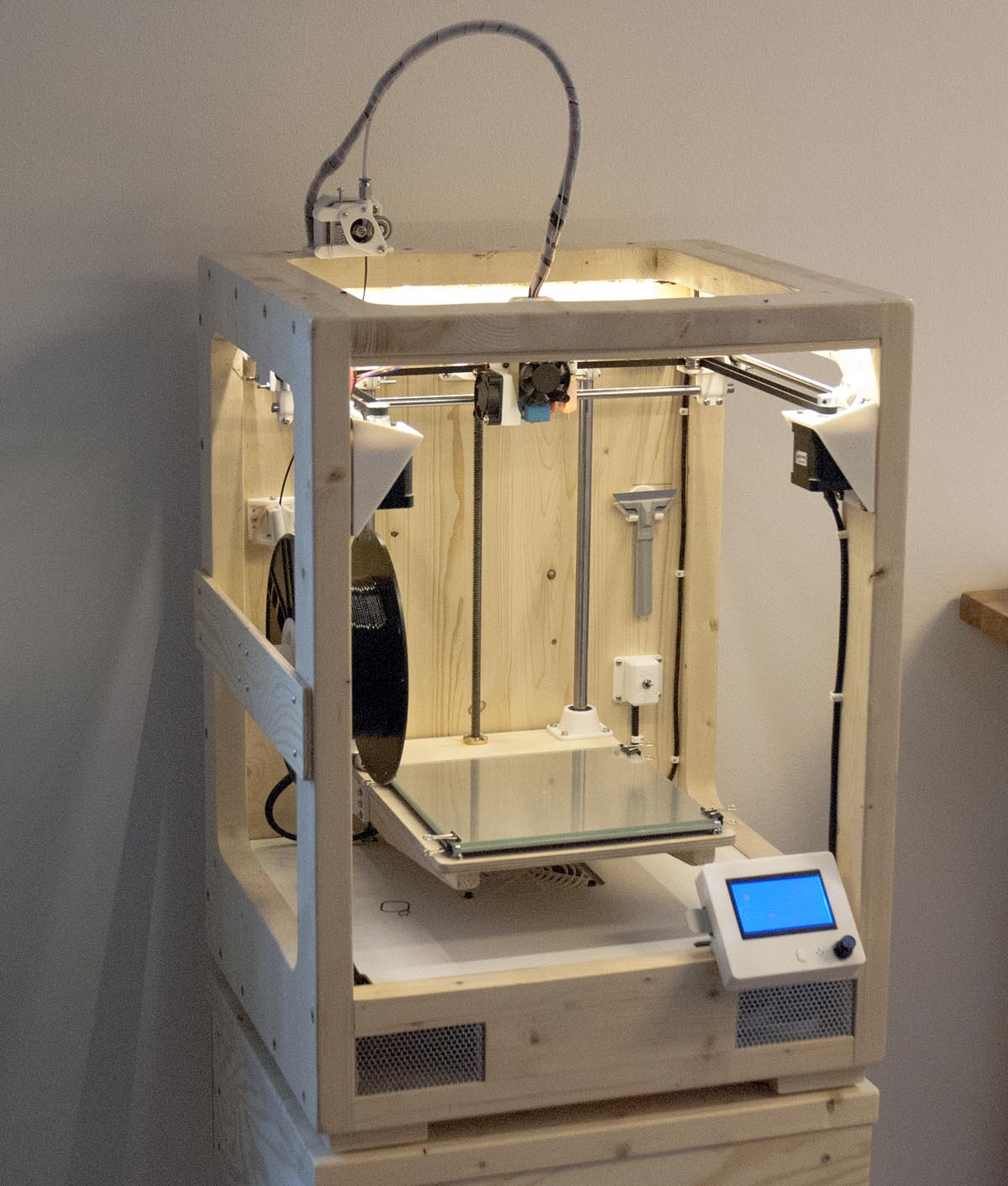
I have created a zip-folder with all the files for my DIY 3D printer. It includes the original SketchUp file, all the exported STL-files ready for printing, and the Marlin RC8 firmware configuration files. You can download it on the 3D printer page: Here
I have built an obstacle avoidance robot I built to test a few ideas I had and learn more about what it takes to make robot robot that can navigate around an indoor environment without getting stuck on things. I will also use this robot to experiment with line following and maybe line-maze solving in the future.
I have rebuilt my balancing robot. The reason was that I wanted to fit more sensors and functions, and there where no space for that in the previous design. I have also rewritten all the code and replaced the Kalman-filter I previously used for angle estimation with a complimentary filter instead. This in combination with a higher center of mass have made the robot a lot more stable and tolerant against pushes and other disturbances.
A Kalman-filter should work better than a complimentary filter, but the Kalman-filter is a lot more complicated. Since I do not understand exactly how the Kalman-filter worked, it was to hard for my to tune it properly. The estimated angle of the robot was reacting to slow. My current solution with a complimentary filter is much more responsive. That allowed me to increase the parameters of my PID regulators to make the robot more stable.
This video shows some new IR distance sensors I have installed on my self balancing robot robot. The IR sensors are short range (5-10 cm) and should prevent the robot from running into things that the main ultrasonic sensors miss. The video also shows two servos I have installed under the robot. They are not connected yet, but they will later be used to raise the robot up again if it falls over.
Made a new video demonstrating how my Arduino based balancing robot can enter balancing mode by itself. The video also shows the robot doing basic obstacle avoidance using its tree ultrasonic rangefinders. The obstacle avoidance if currently done by one of the Arduinos, but this a typical high level function that will later be handled by the Raspberry Pi.