I have made some progress with the self balancing robot. The speed of the motors is now controlled using two cascaded PID regulators. One regulator adjusts the speed of the motors to maintain a setpoint angle. The other PID regulator adjusts this setpoint angle according to a setpoint speed. This new control system allows the robot to return to its original position when disturbed. The robot can also find a new angle for balancing if the center of gravity is moved, or the robot is standing on an inclined plane.
In this video I use the Raspberry Pi for a very basic form of remote control. I connect to the robot using SSH, then I run a serial terminal program on the Raspberry Pi to send ascii characters the the main Arduino. The video also shows an example of video and photo quality from the Raspberry Pi camera.
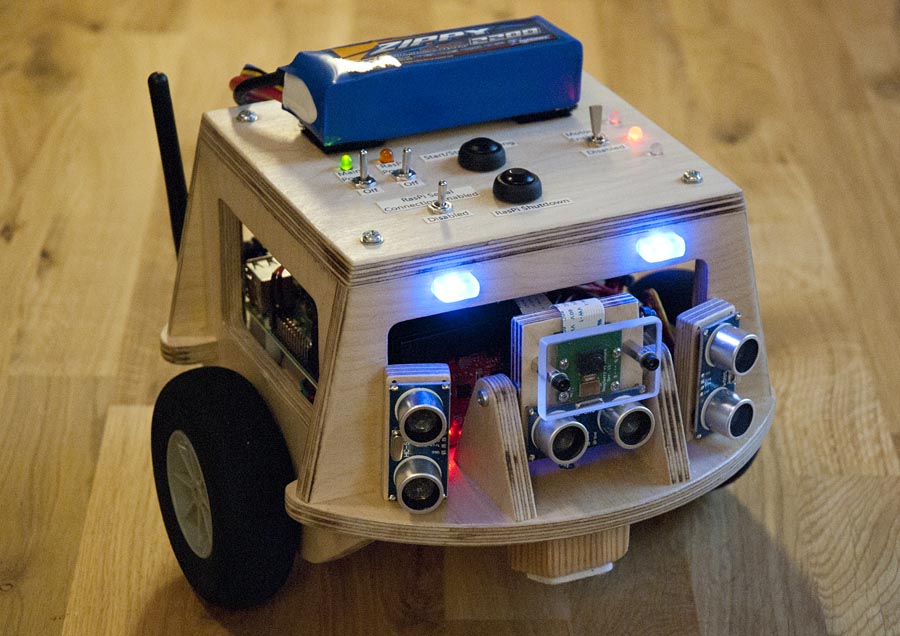
The three ultrasonic distance sensors and the tilt servo for the camera module are not connected yet…