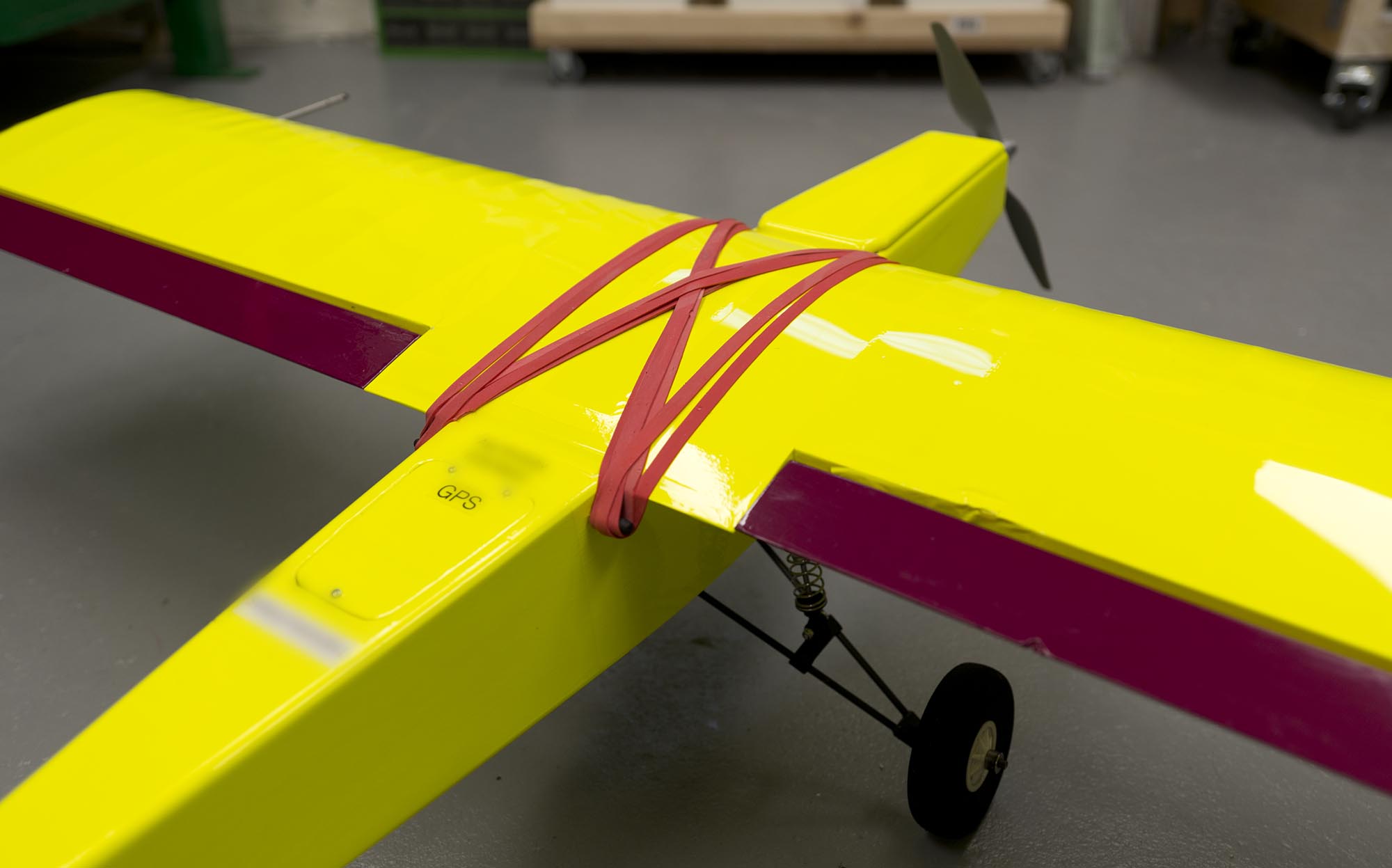
This is an airplane I built to experiment with the ArduPilot/ArduPlane firmware. I built the plane at the beginning of the year 2020, and continued to tune and improve it in 2021. My goal with this project was to try and make a plane the can take off from the ground, fly an auto-mission with multiple GPS waypoints and then make a controlled wheel landing on the runway, all while flying fully autonomously by itself. I also wanted it to be repeatable and work in different whether and wind conditions.
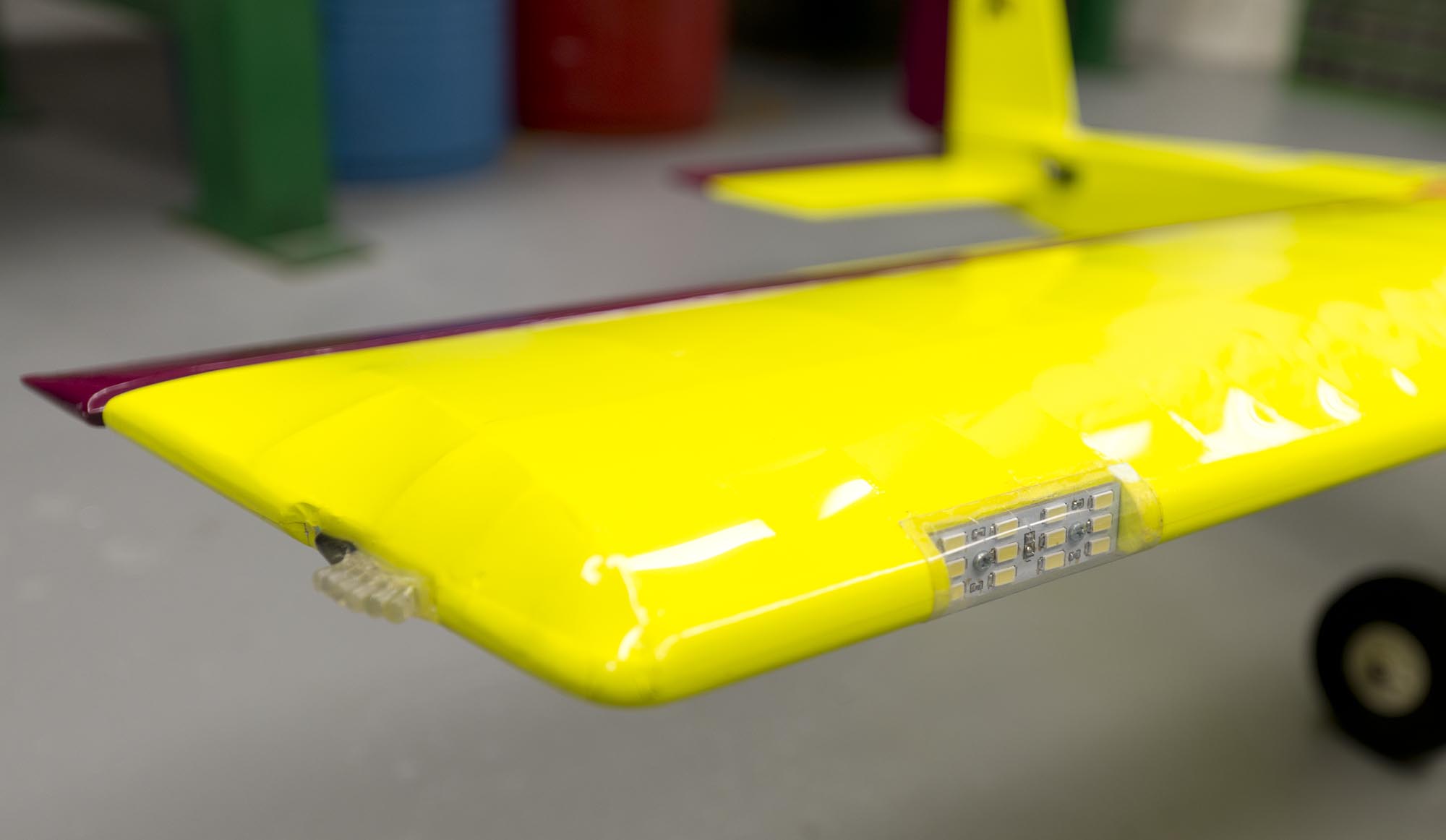
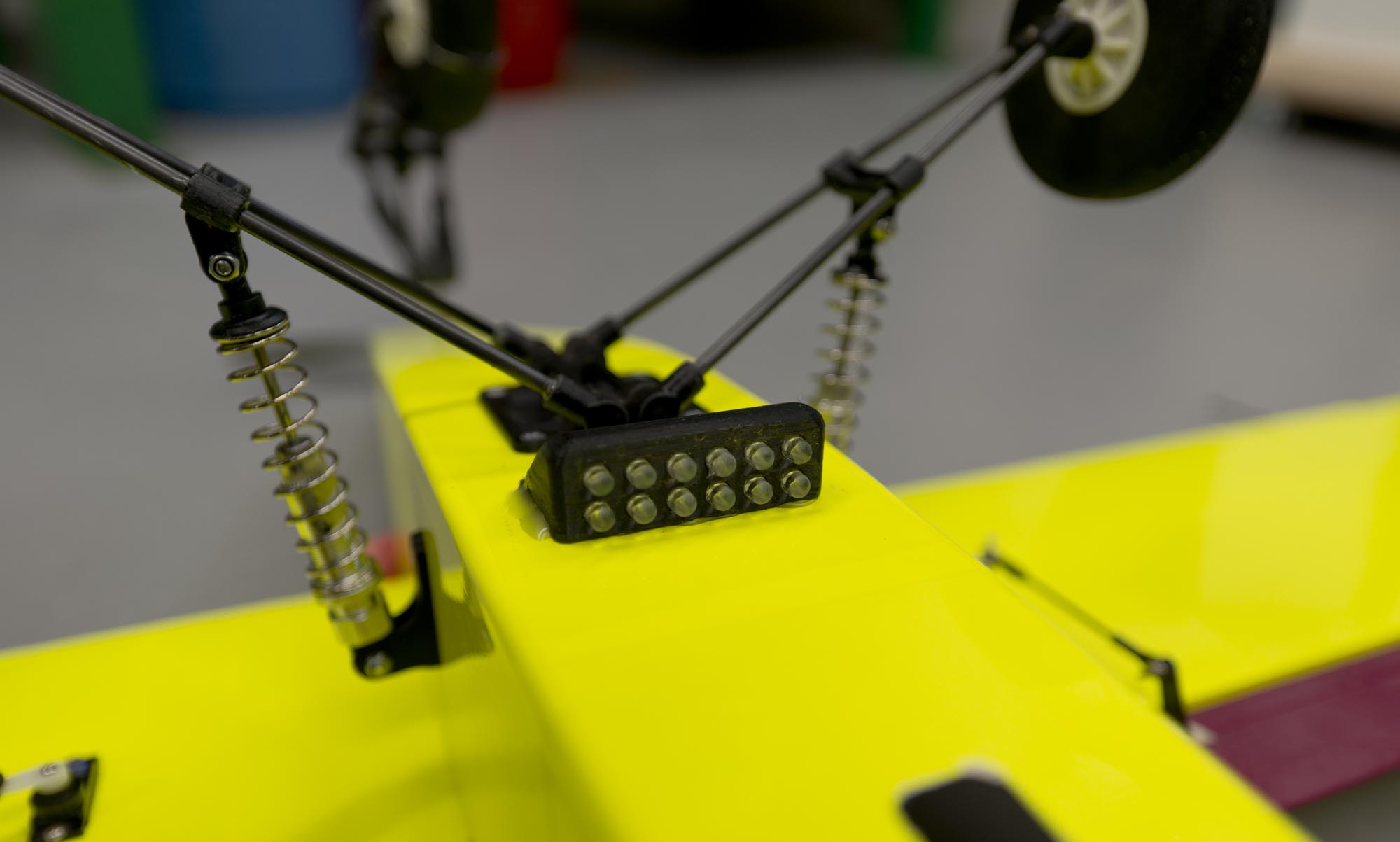
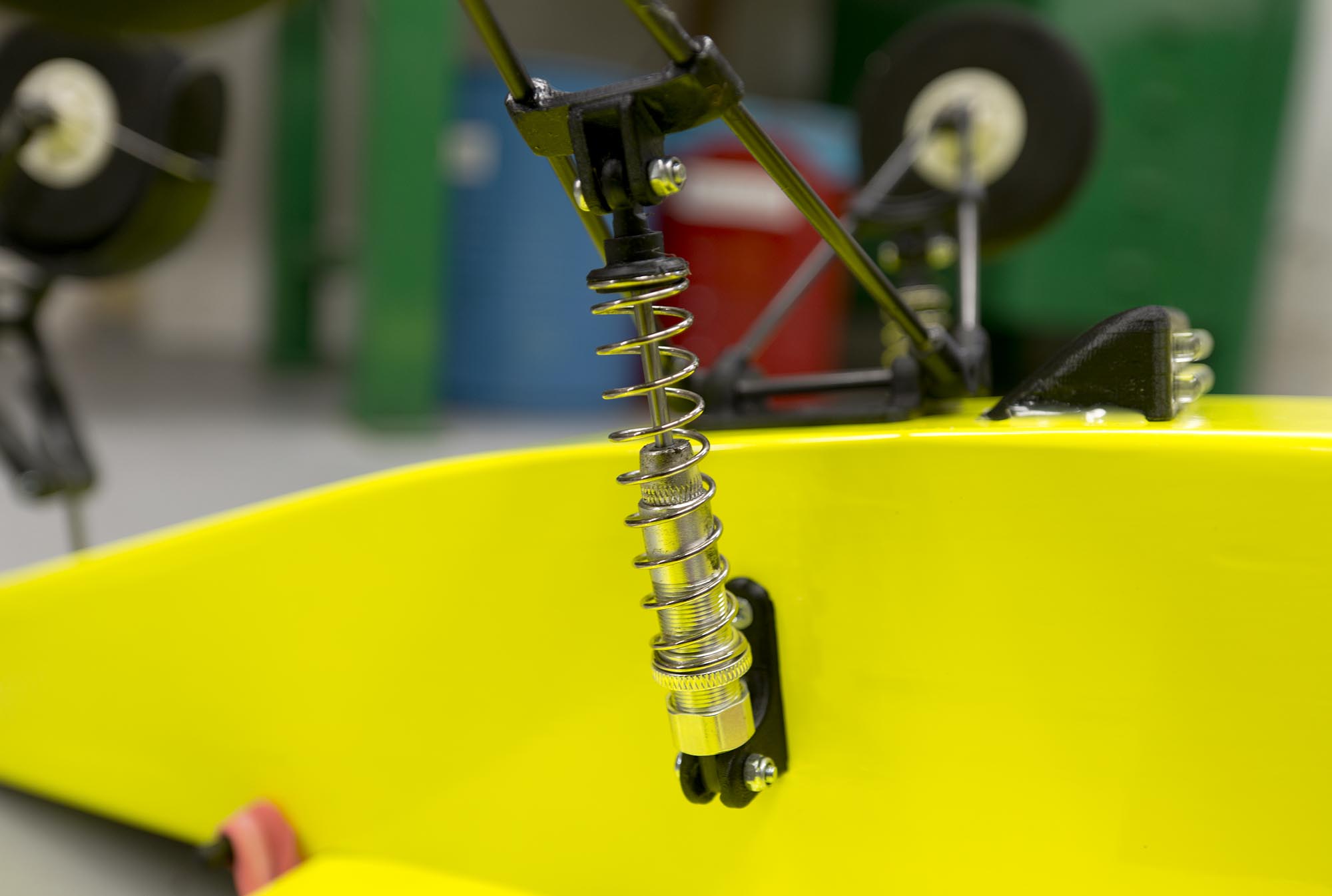
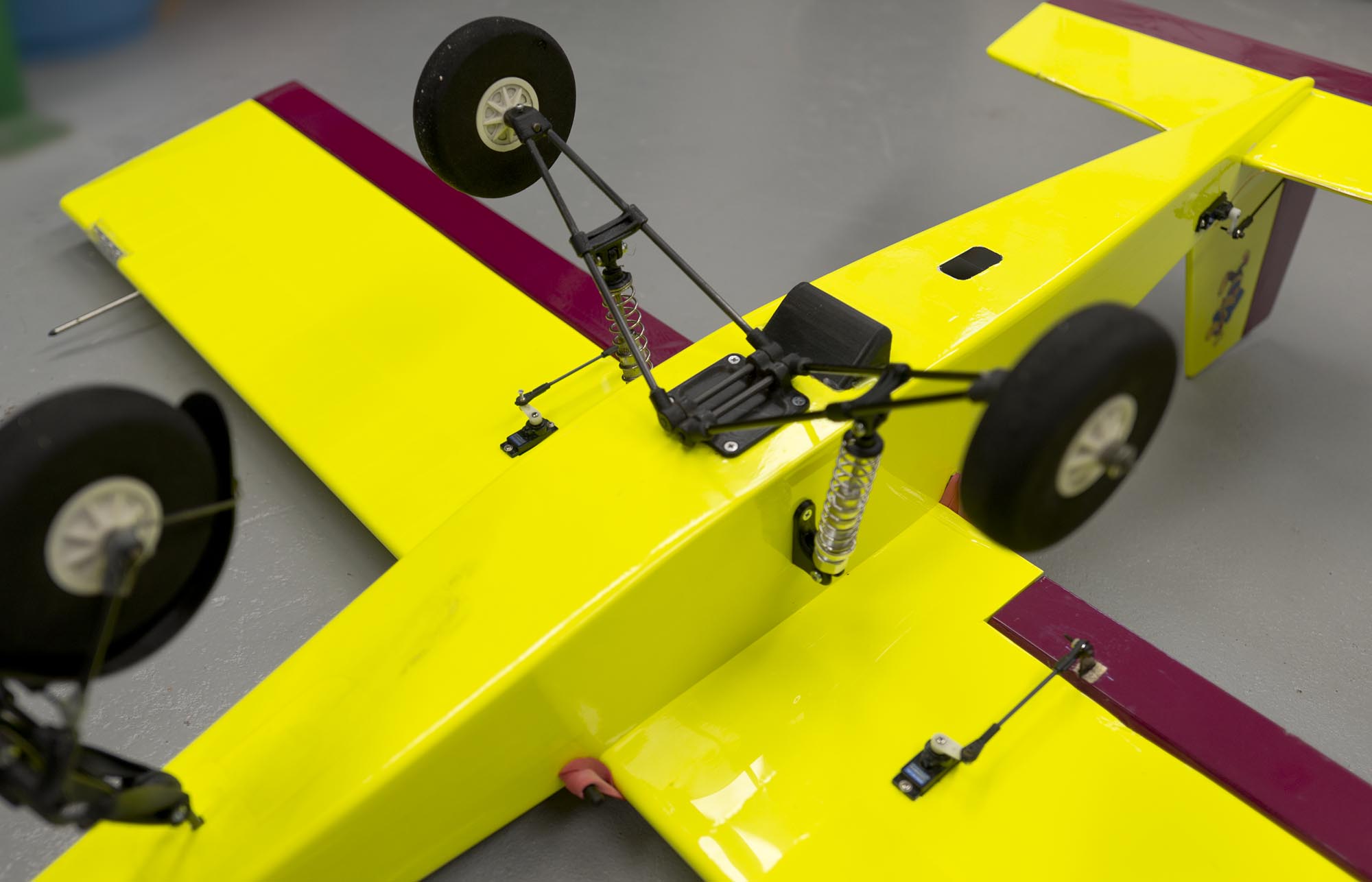
The plane itself is a custom-built balsa plane I designed and built specifically for this task. The wingspan is about 1.2 meters and the total flying weight is about 1200 grams. The plane has all the standard control surfaces: ailerons, rudder, and elevator, but no flaps or airbrakes since that is not necessary. I designed the plane with heavy-duty landing gear with a steerable nose wheel for good ground handling. The landing gear also has good suspension, sinse the field I way at is very bumpy.
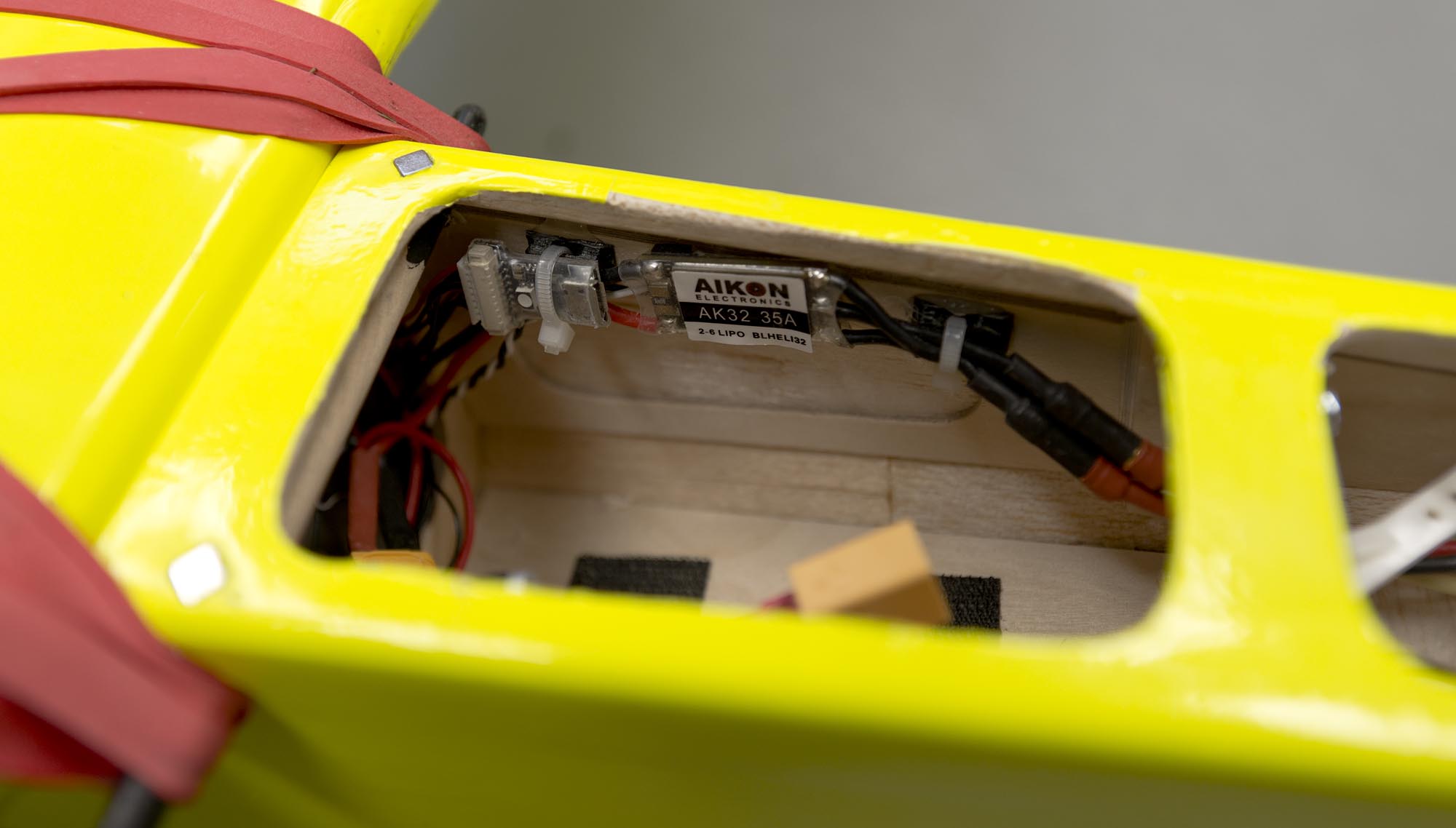
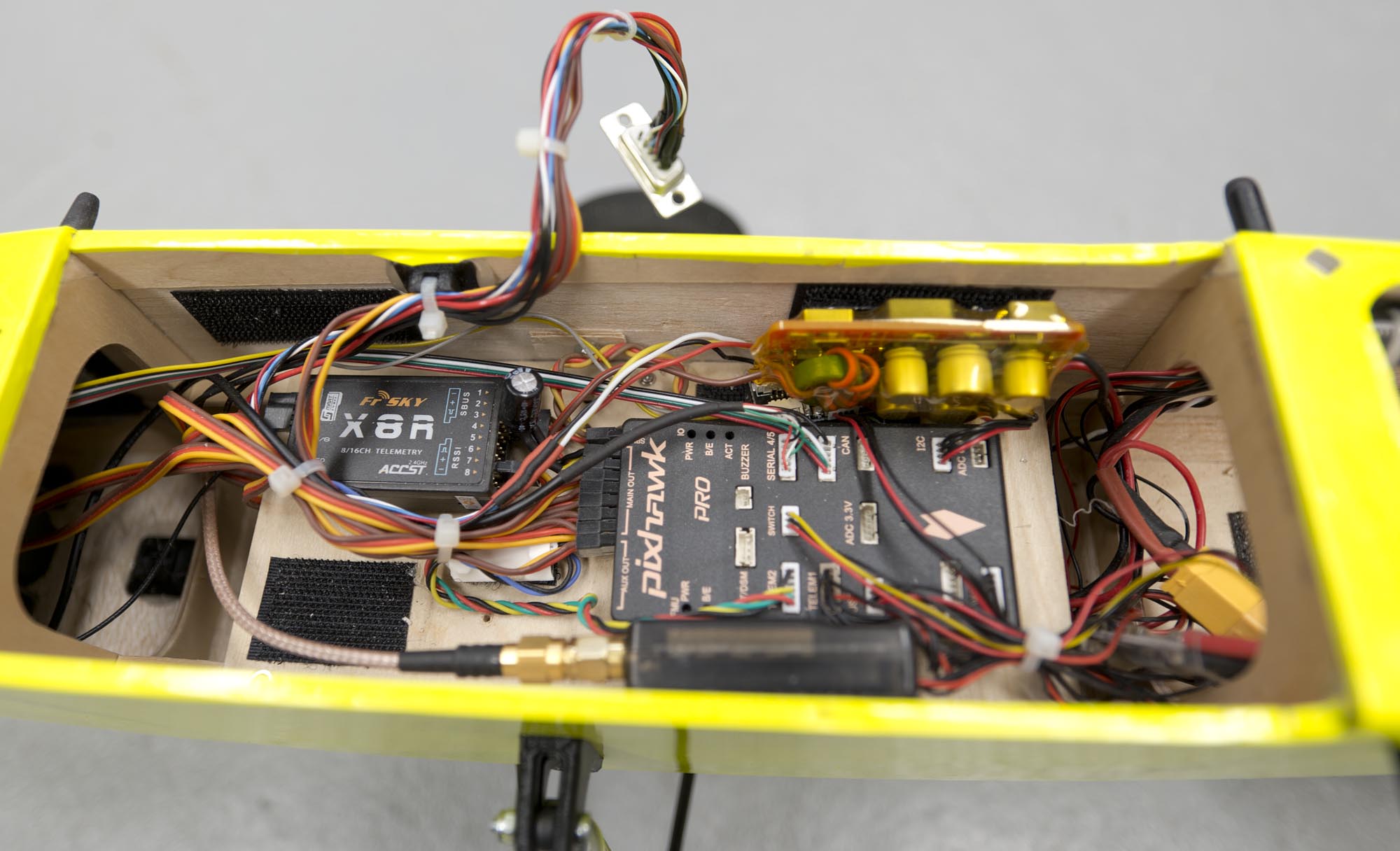
Setup and electronics used in this plane:
- Motor: Some old AXI motor without the sticker, relatively high KV. 8×4 prop
- ESC: AIKON AK32 35A BlHeli_32
- Battery: 4 cell 18650 LG HG2 li-ion
- Servos: 5x 12 gram digital metal gear
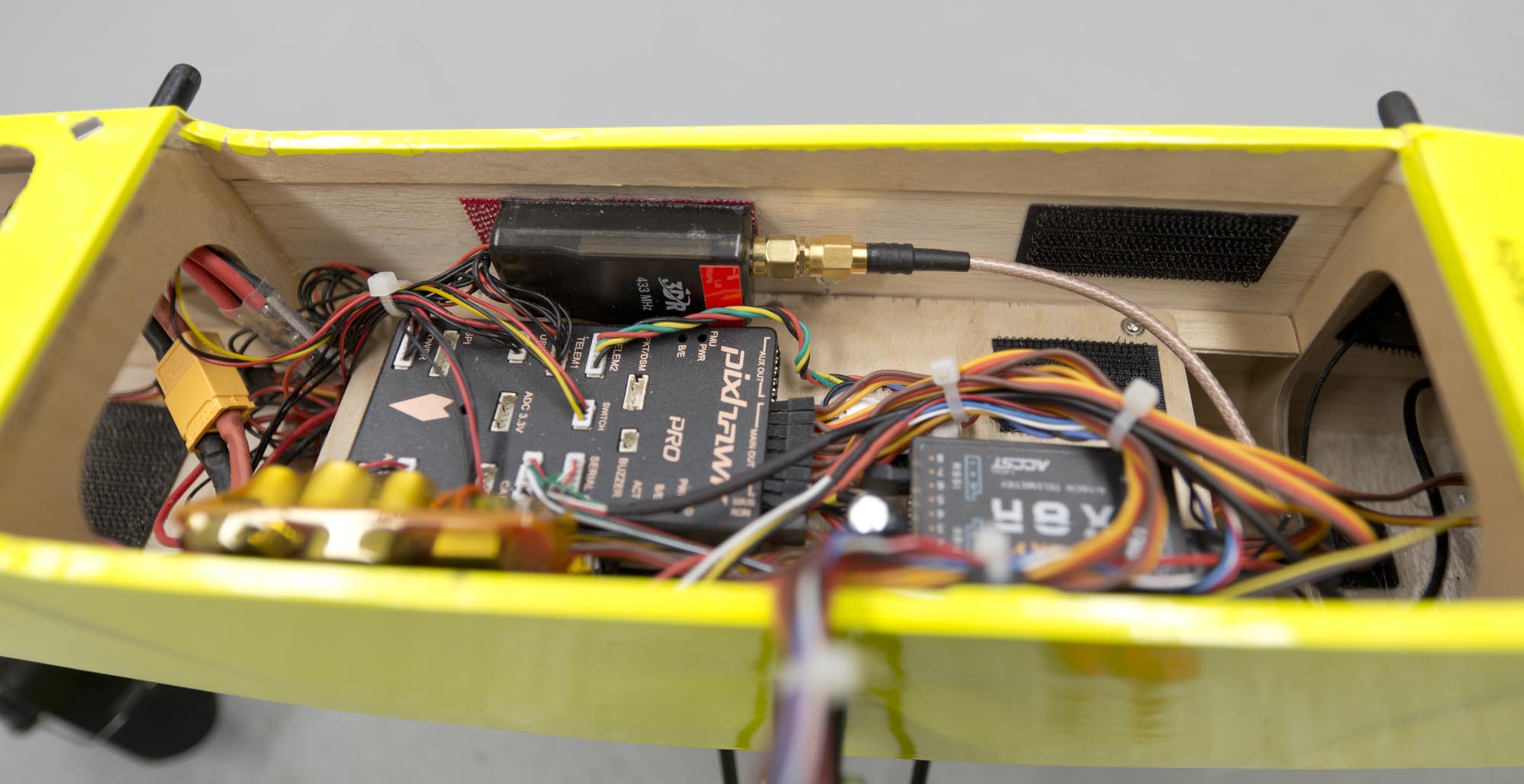
- Autopilot: china clone Pixhawk
- Telemetry: Original 3DR Sik radio modules
- GPS: Beitian BN-880 with built in compass
- LiDAR rangefinder: Banewake FTmini plus
- Airspeed-sensor: Mateksys digital airspeed sensor ASPD-4525
- RC receiver: FrSky X8R
- RC transmitter: Radiomaster TX16S running Yaapu telemetry script
- My own redundant BEC module to power the servo-rail on the Pixhawk: https://axelsdiy.brinkeby.se/?p=1915
3D-printed parts for the landing gear with suspension are available here.
Here is a copy of the config/parameters file. Many people have asked for it. Please don’t blindly just copy this to your own aircraft. The risk of crashing or other problems will be high. Instead, use this as a reference together with the official ArduPilot documentation while setting up your own aircraft. Link to my configuration: https://brinkeby.se/downloads/Axels_ArduPlane2020_2022-12-25.zip
Below are a few videos of the plane flying
In this first video, I was testing the plane without an airspeed sensor and LiDAR rangefinder. The plane flies great in the air but it is very hard to tune in the landings to work well when the plane is not aware of its airspeed and the exact distance to the ground. Sometimes the flares at too high above the ground and sometimes, like the last landing in the video, it is perfect, but it is totally random.
In this second video, I have equipped the plane with an airspeed sensor and LiDAR rangefinder. I have not got it working perfectly here, but it is better than the previous video. The landings are a lot more predictable. Here I also experimented a bit using reverse thrust to slow down and control the aircraft on final.
In this third video, I think I got the plane a lot better tuned in. The landings are even more predictable. I was flying a simple auto-mission with a takeoff, go-around, and landing about 10 times in a row while recording this video. All landings were what I consider good. But there was almost no wind this evening.
I will probably continue to test auto-landing in different conditions and higher winds.
Below are a few detail images of the plane. Click on the images to make them larger.