A collection of some of the robots I have built.
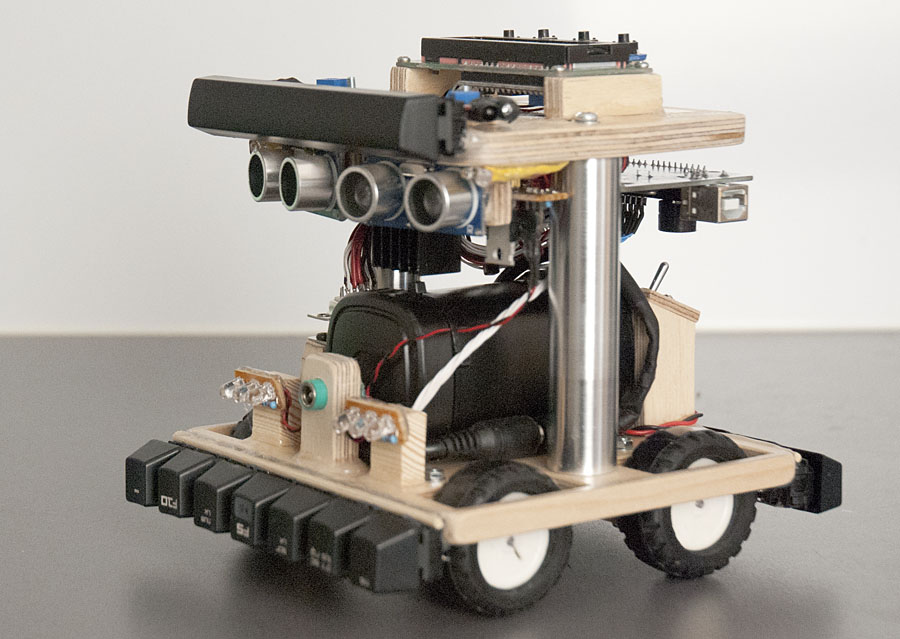
Arduino Mega balancing robot
A new and improved version of my balancing robot. This one is using an Arduino Mega to drive the two stepper motors using hardware interrupts. The robot also has four ultrasonic rangefinder sensors for obstacle avoidance. Arduino code and wiring diagram is available!
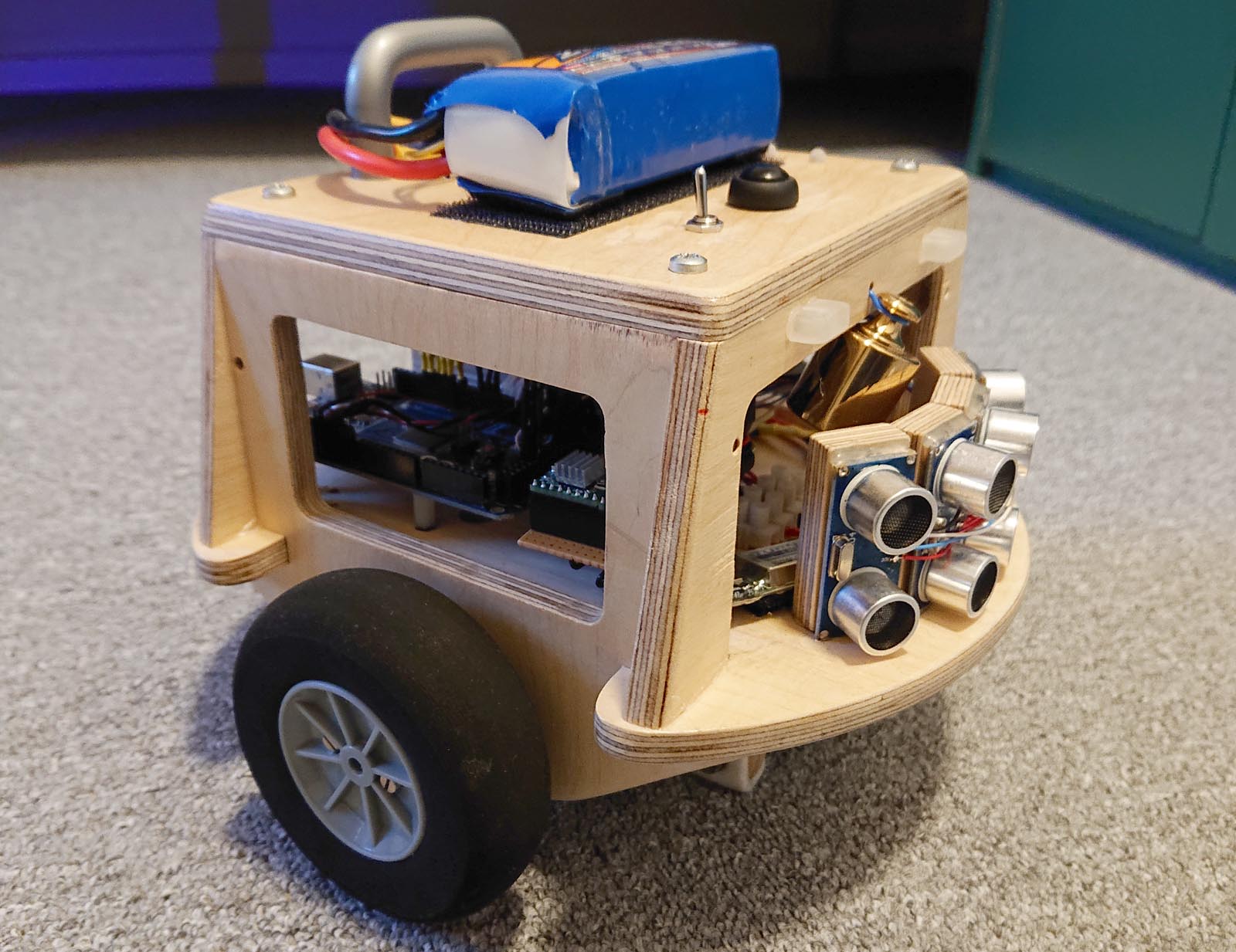
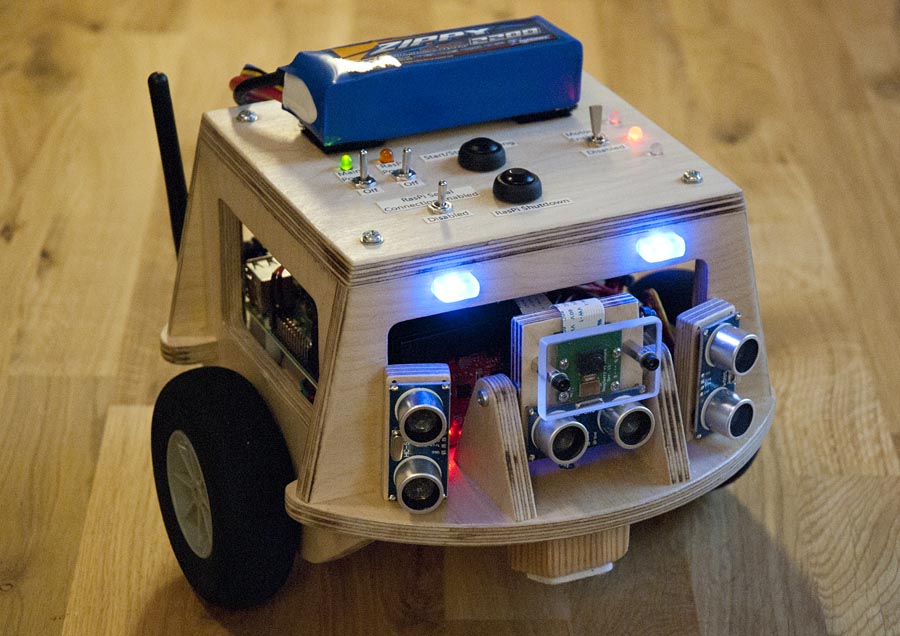
Indoor obstacle avoidance robot
A high-performance indoor obstacle avoidance robot. Based on Arduino Mega 2560, using several sensors, including multiple sonars. This robot also has a Raspberry Pi and a camera, that can be used for computer vision experiments.
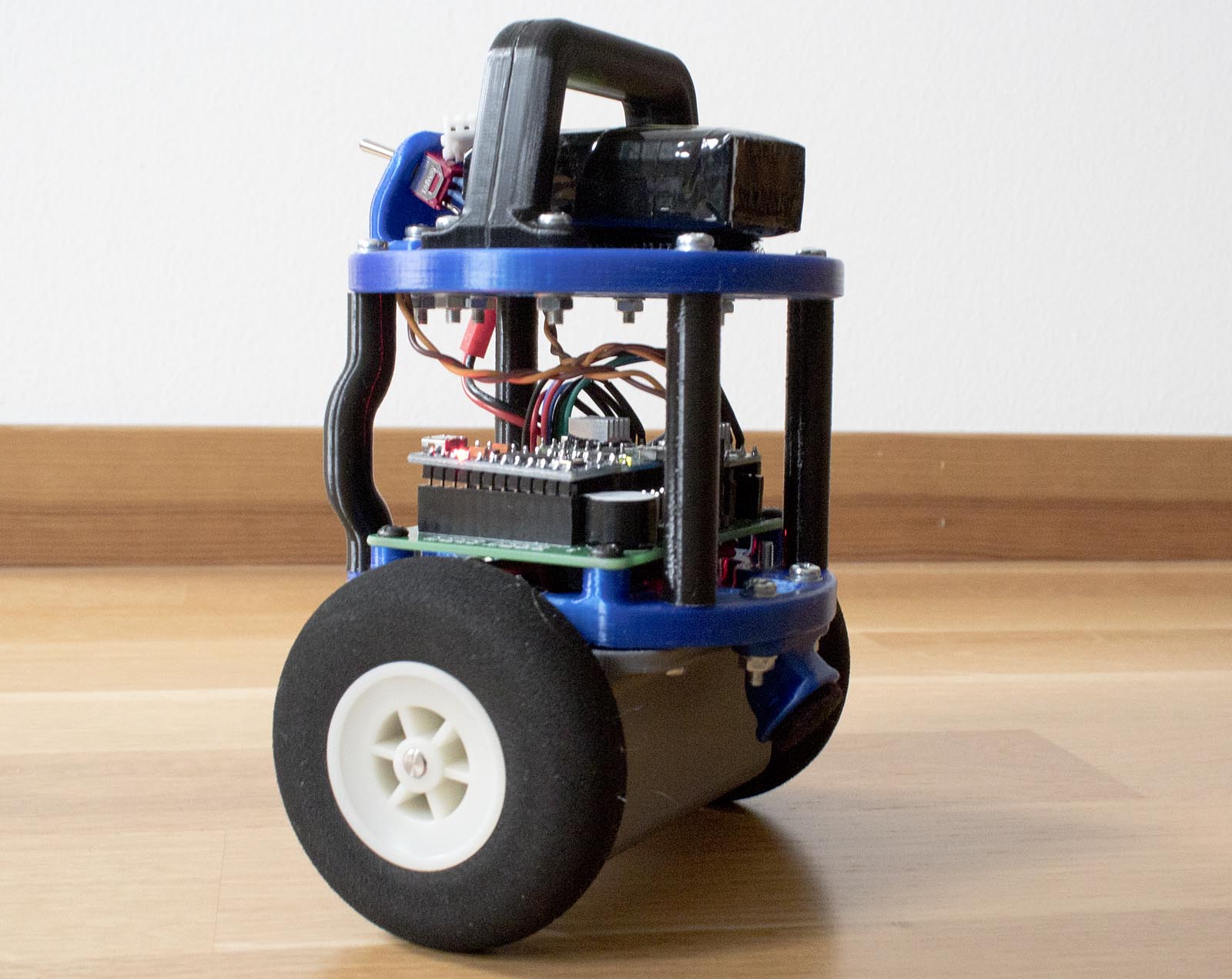
Mini balancing robot
A small and simple balancing robot using a single Arduino, an MPU-6050, and stepper motors. All the design files, code, and schematic are available for download.
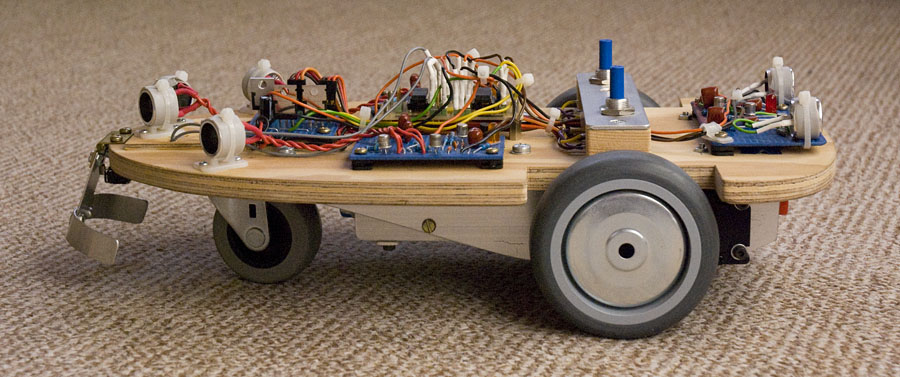
Prototype Rover 1
An Auduino Mega based obstacle avoidance robot I built to test a few ideas I had and learn more about what it takes to make a robot that can navigate around an indoor environment without getting stuck on things.
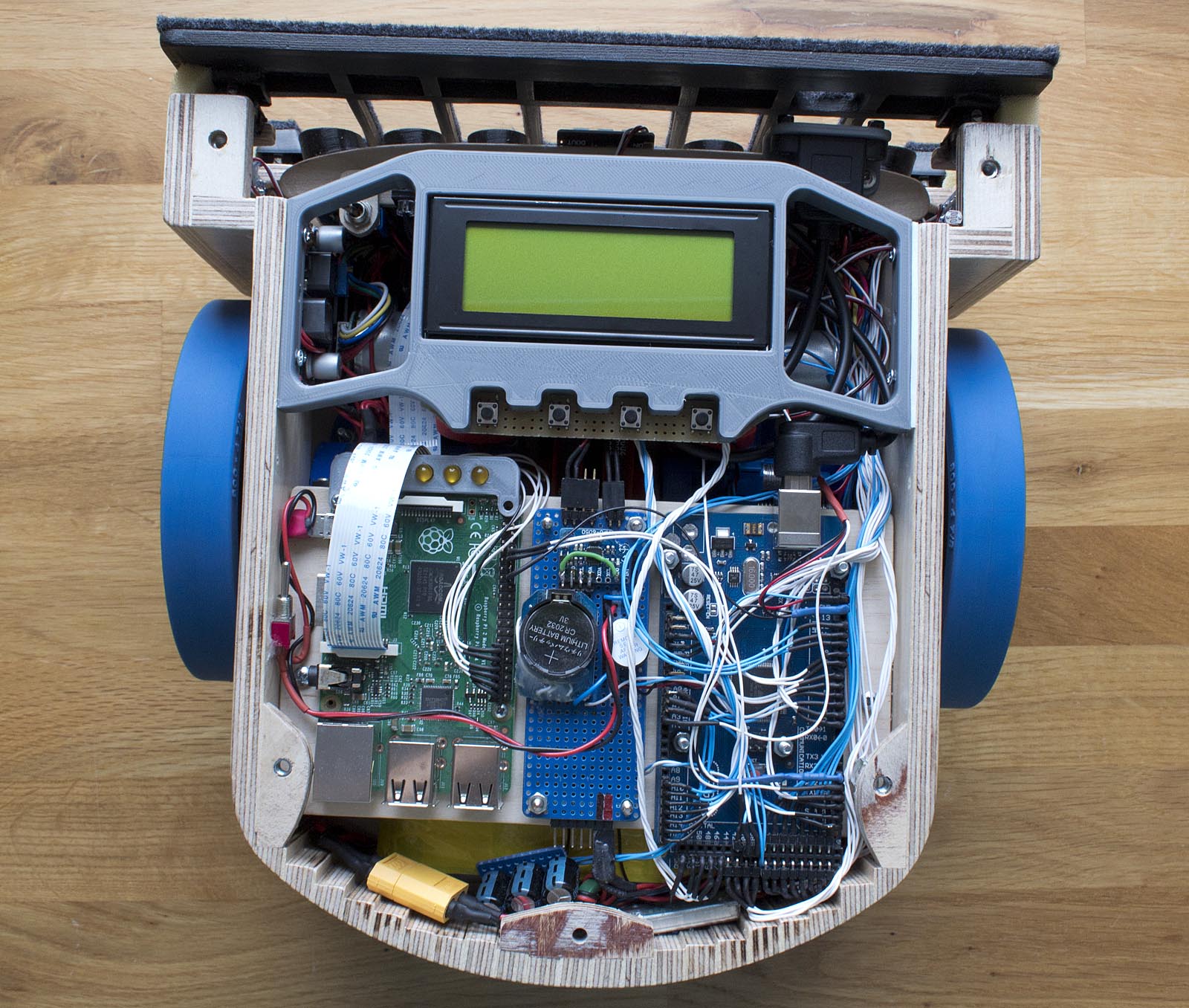
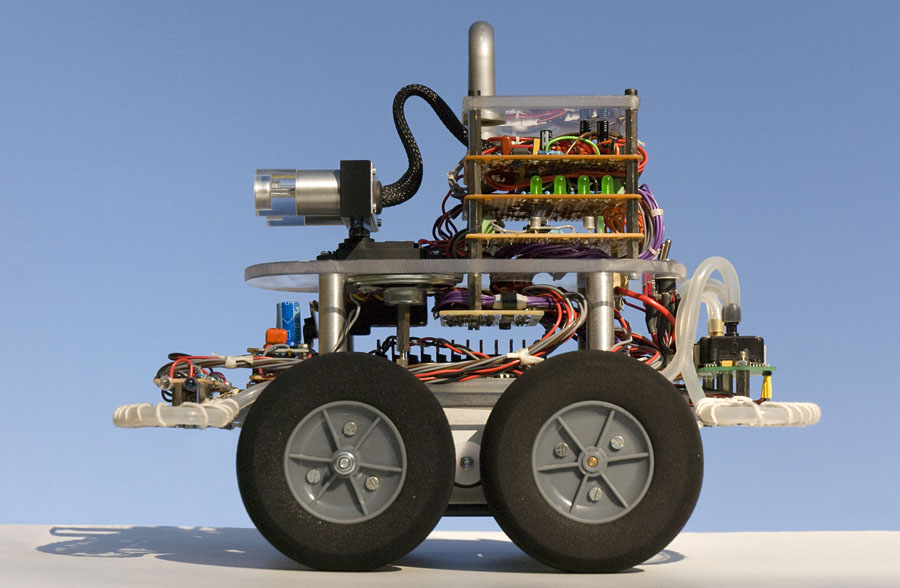
Balancing Robot with Raspberry Pi
This is a two-wheeled self-balancing robot designed for experimenting with more advanced things than my other robots were capable of. This robot is based around multiple Arduinos and one Raspberry Pi.
ArcRover
ArcRover is an outdoor rover with GPS based on the Raspberry Pi. This robot was a platform for developing network communication applications, navigation algorithms, and data acquisition.

EquipoiseBot
EquipoiseBot is my first two-wheeled self-balancing robot project. It can be controlled using a home-built IR remote. This is my fourth robot built in the autumn and winter of 2011 – 2012.

Third robot
My third robot can navigate around a route with pre-programmed waypoints using GPS.

Second robot
My second robot can drive around autonomously in an indoor environment and avoid obstacles, just like my first robot, but this one has more sensors and more complex behavior.
First robot
I built my first robot in 2008. It can navigate in an indoor environment and avoid obstacles. It uses three home-built ultrasonic range finder sensors.