This is my second custom-built experimentation platform for autonomous flight. I built this plane in 2023 it is an evolution of my previous plane, the “ArduPlane 2020”. More about that here on this page.
This plane is a work in progress. I will continue to update this page as I fly it more and make changes to it.
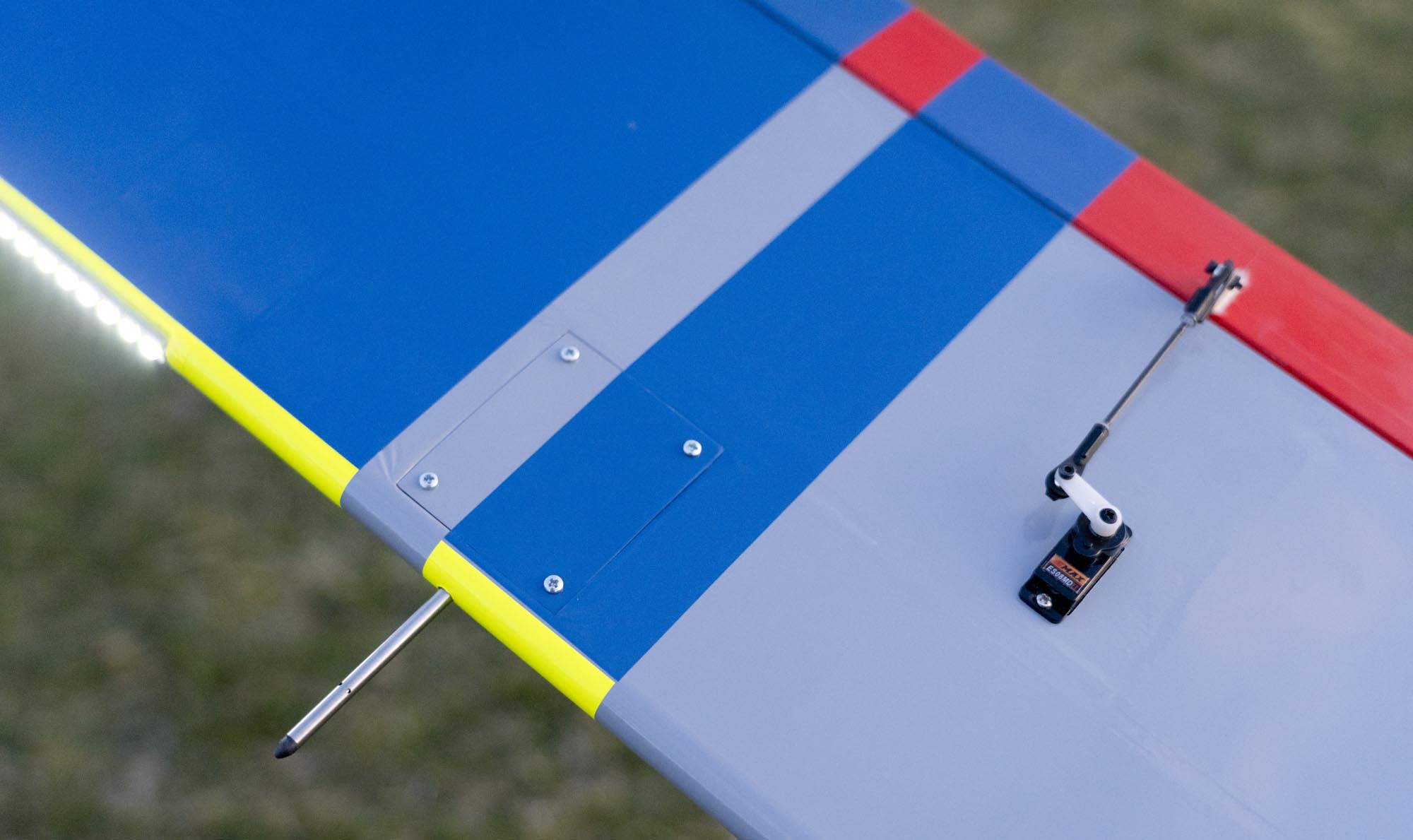
This plane is slightly larger than its predecessor and also more efficient. This is mostly due to less air resistance but also lower weight. This plane glides better and is also more controllable. The control surfaces are larger and can move more. It also has dual elevators with individual servos for redundancy. This plane is also designed with free space in the fuselage, close to the center of gravity, to be able to carry small payloads or bigger batteries for longer flight times.
The cruising speed is about 12 m/s. The stall speed is about 8 m/s. And the maximum speed is about 20 m/s. The flight time with a standard battery (4 cell 4000 mAh Li-ion) and no other payload is about 30 minutes. The plane weight in this configuration is about 1500 grams. The wing span is 150 cm and the wing loading is about 45 grams per square decimeter.
The plane has a Mateksys digital airspeed sensor 4525 and a Benewake FTmini Plus downwards-facing lidar distance sensor to assist during autonomous landings. The flight controller is a Mateksys f765-WSE running the ArduPlane firmware.
3D-printed parts for the landing gear with suspension are the same as my previous ArduPlane project and are available for download here.