This quadcopter is basically a second version of the hexacopter. I used fuselage and Ardupilot Mega 2.6 from the hexacopter and built a new frame with four motors instead. Smaller wood dimensions was used to save weight.
I wanted to be sure that I do not push the limit of the motors on this design. I also wanted to have larger, slower spinning propellers to increase the efficiency of the copter. And of course, I wanted higher quality motors than the DT750s, which was the main problem on the hexacopter. After a lot of research I fond the AX-2810Q-750KV motors which turned out to work well. I have so far flown it for over tree hours without any problems. About 22 amps is needed to maintain a hover. I get around 12-14 minutes of flight time om my 3 cell 8000mAh batteries, which I consider very good.
The torque from the large propellers makes it possible to make fairly fast yaw adjustments. The large propellers also makes a different sound compared to what I am used to after my previews multirotors. This one hovers at 40% throttle and it climbs very fast while applying full power.
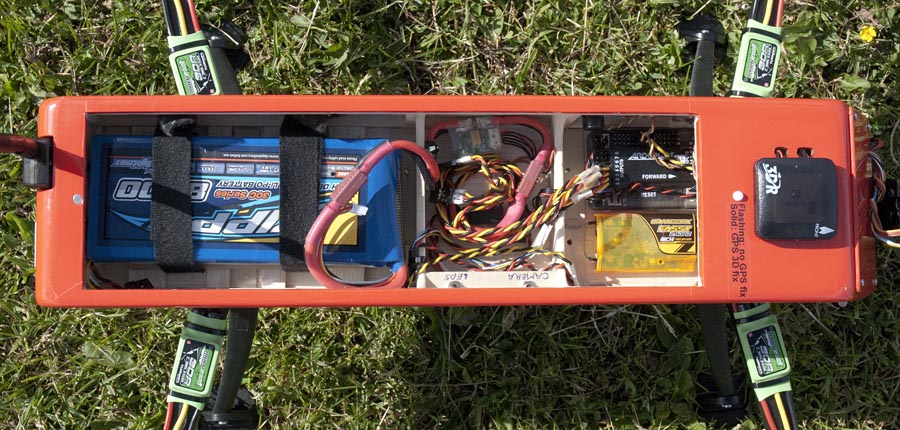
This is my current setup:
- 3DR APM 2.6 flight controller with GPS, Current sensor and telemetry.
- AX-2810Q-750KV motors.
- 13×6.5 Carbon fiber propellers.
- Turningy Multistar 30A opto ESCs.
- Zippy Flightmax 8000mAh 3 cell LiPo battery.
- Quanum 2208 gimbal Motors.
- Martinez Open Source gimbal controller V3.
- Cheap board-camera from ebay for FPV.
- GoPro Hero 3 camera for video recording and FPV.
- Hobbyking 3CH video switch.
- Hobbyking GoPro FPV Lead.
- Hobbyking 15cm Reinforced plastic Undercarriage.
I did have some problems with the quad self oscillating in roll axis during initial testing. This was do to my long and narrow fuselage. But after tuning down the roll parameters in the Ardupilot it was possible to get it to fly relatively easy.
Overall the Ardupilot feels like a very reliable system to fly with. It has lot of failsafe features and a really good battery monitoring system. I use the Droidplanner app with telemety on my phone which I have in my pocket when I fly. The app reads out loud battery status for every 10% discharged, as well as which flight mode is active whenever I change mode. When the battery remaining drops below a threshold I have set, the copter automatically returns home and lands itself regardless of flight-mode and how and where I fly.
I usualy fly in “stabilize mode” or “loiter mode”. In Stabilize mode the copter’s angle is controlled directly by the stick. I have full manual control of the throttle. This is good for fast forward or more aggressive flying. In Loiter mode, the copter uses its sensors (GPS and barometer) to stay at a position. This position can than be moved around using the transmitter. This is great for hovering and slowly gliding around and looking at stuff. Both vertical and horizontal speed is limited in this mode, and when the stick is centered the copter automatically stops and hovers. This makes it very easy and relaxing to fly is this mode, even in windy conditions. The copter is capable of holding its position within 2 or 3 meters both vertically and horizontally even when it is very windy.
More info about the FPV stuff coming soon.