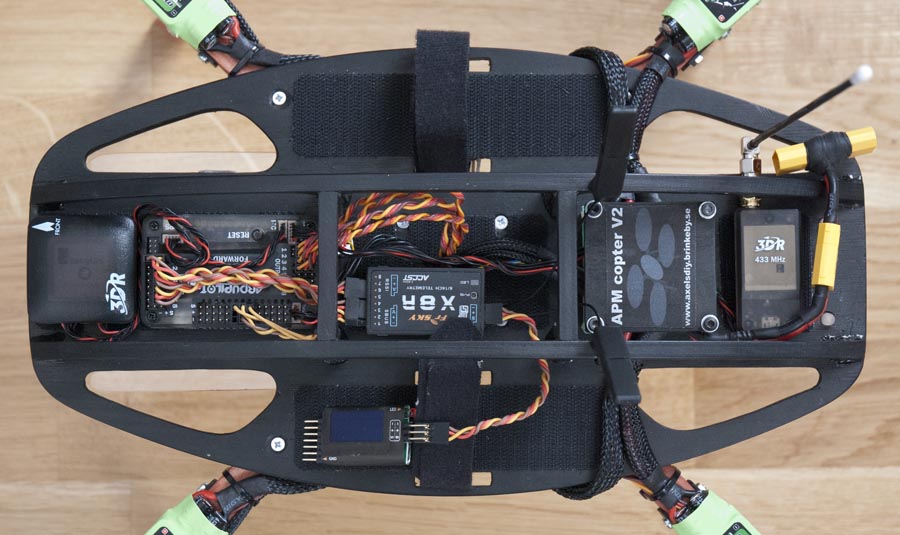
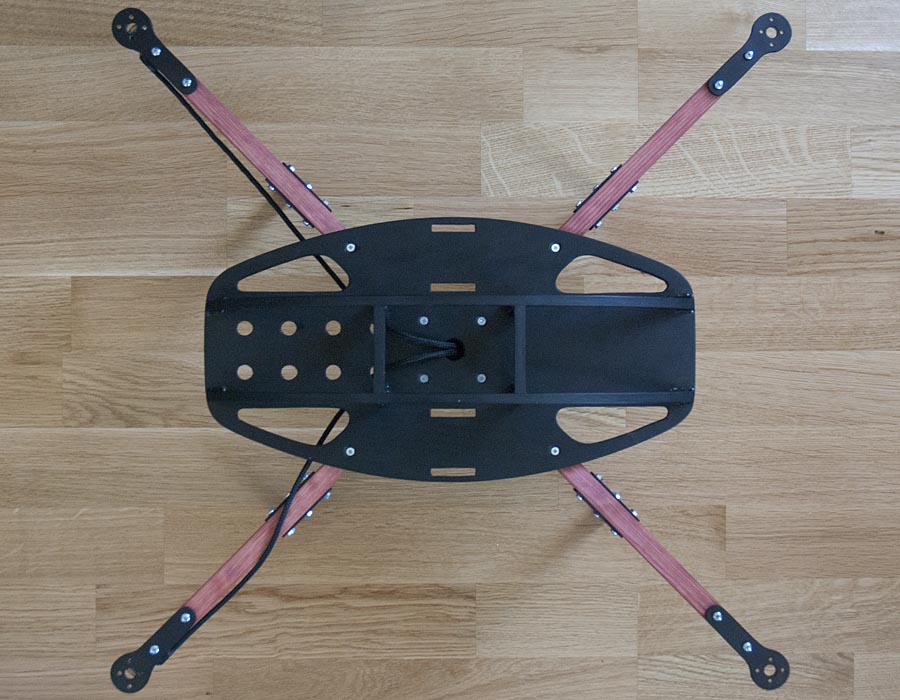
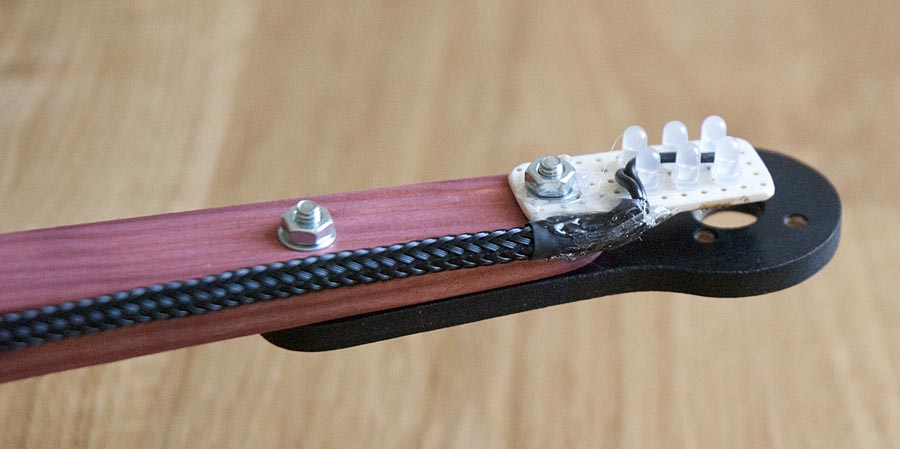
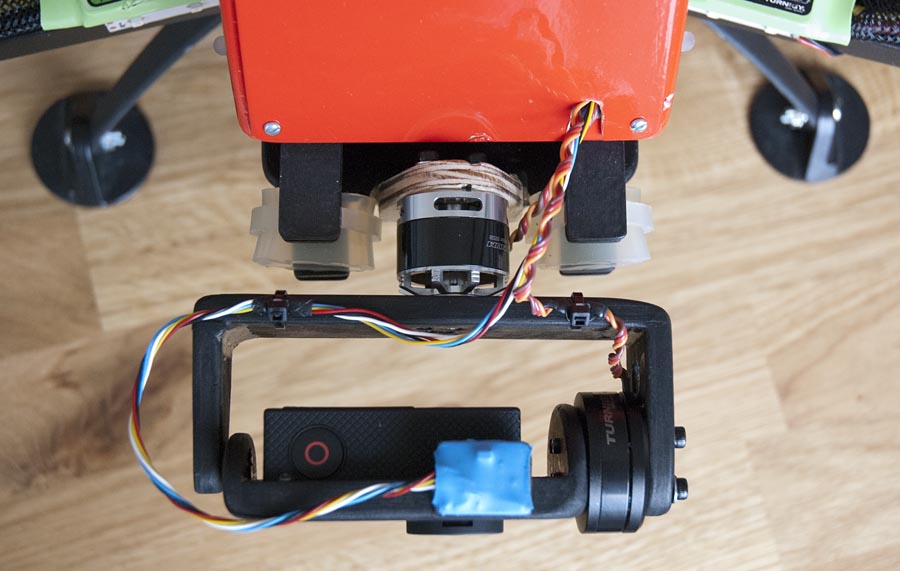
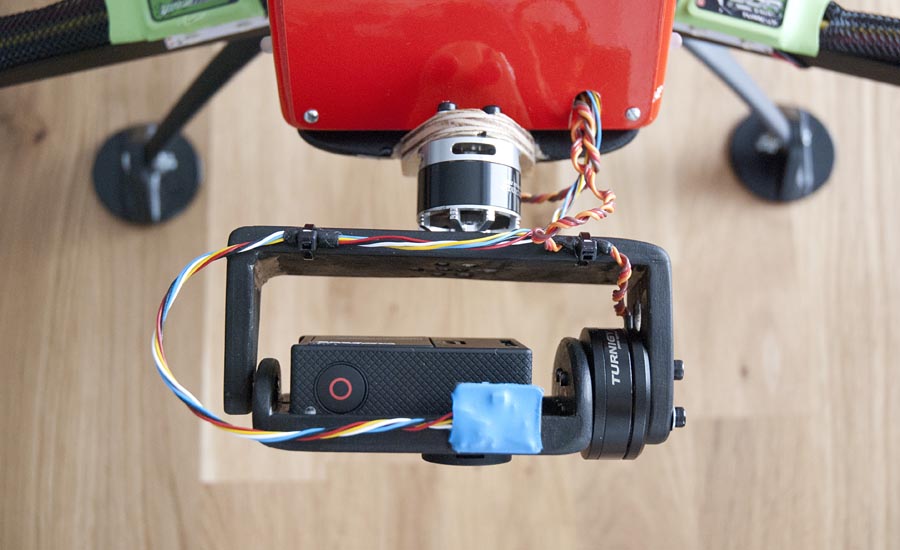
Here I am testing my homebuilt gimbal om my new APM quadcopter. It is a two axes gimbal based on the same Martinez Open Source gimbal controller and the same Quanum 2208 gimbal motors as the first APM quadcopter. I am not happy with how mush of the propellers that are visible in the video. Maybe a solution could be to extend the gimbal and landing gear further down. During this flight I used my 13-inch propellers that I cut down to about 11.5 inches.
APM copter V2 gimabl testing
Leave a Reply