Here is a compilation of some of my videos/projects from the past year. Plans for 2022 are to continue to make projects I find interesting. Everything from electronics to RC stuff. I will probably start the year by working on and finishing the new balancing robot.
I want to experiment more with ArduPilot also, making a multicopter platform for some experiments, and also ground rovers or maybe a boat.
Maybe I will also experiment with some new content on my YouTube channel. New video formats/video ideas etc.
Maybe I will also post some game-development-related stuff in the coming year. It was a few years since last I posted such things. But a have actually made some stuff that I have not shared. Including a DIY Unity-based RC plane simulator.
An iteration of my previous design, the Bush Beast 3. This plane has larger control surfaces and larger flaps than previous models. I also made a new landing gear design based on Mike Patey’s Scrappy plane. Of course, I still have all the features of my previous version, including reverse thrust, a DIY light system, and also a DIY gyro stabilization system to make it fly stable in high wind conditions.
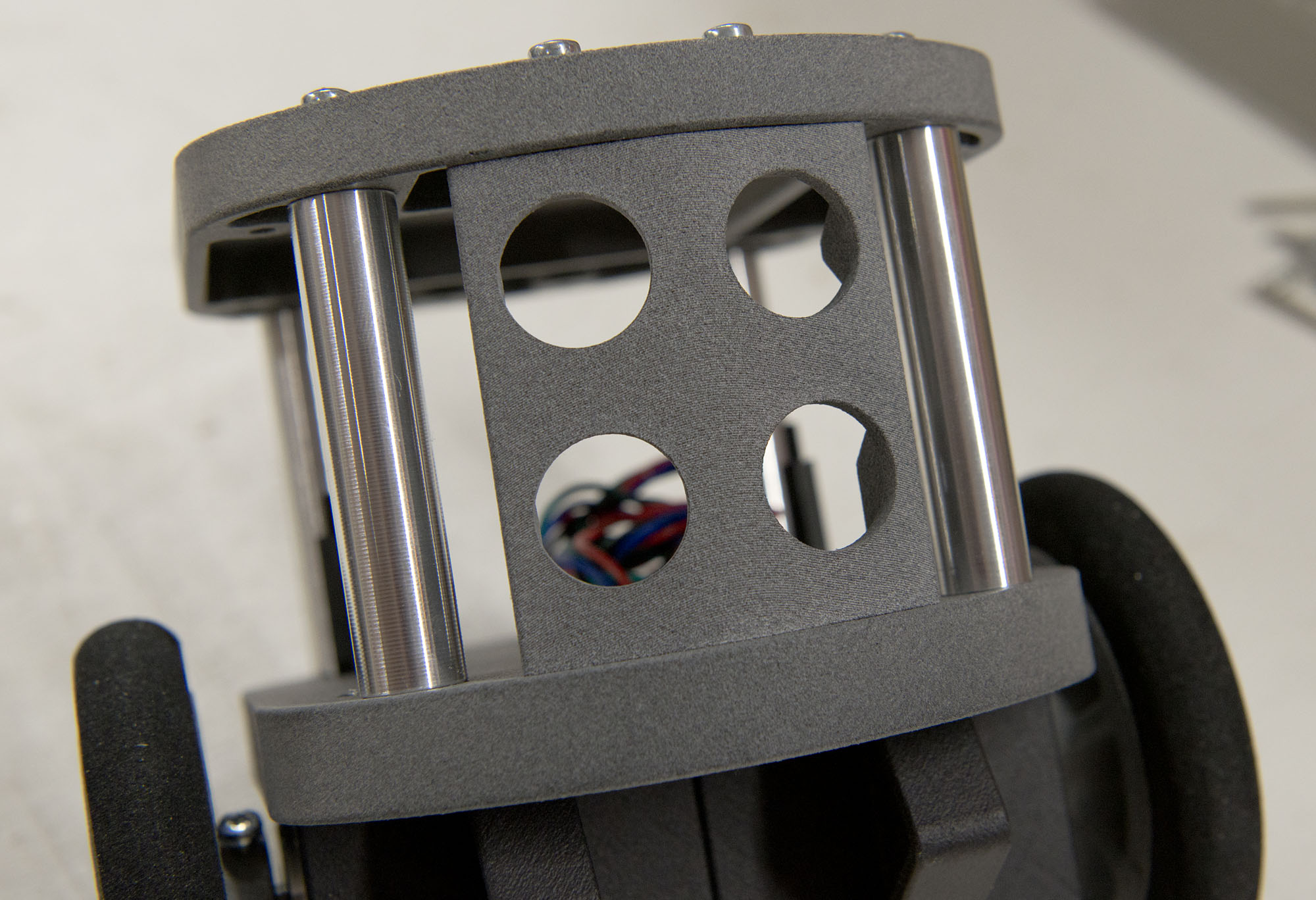
I started a new two-wheeled self-balancing robot project. I have built a few balancing robots before. This time, I want to make it even better. Trying out some new things while also making the robot even better documented and easier to replicate.
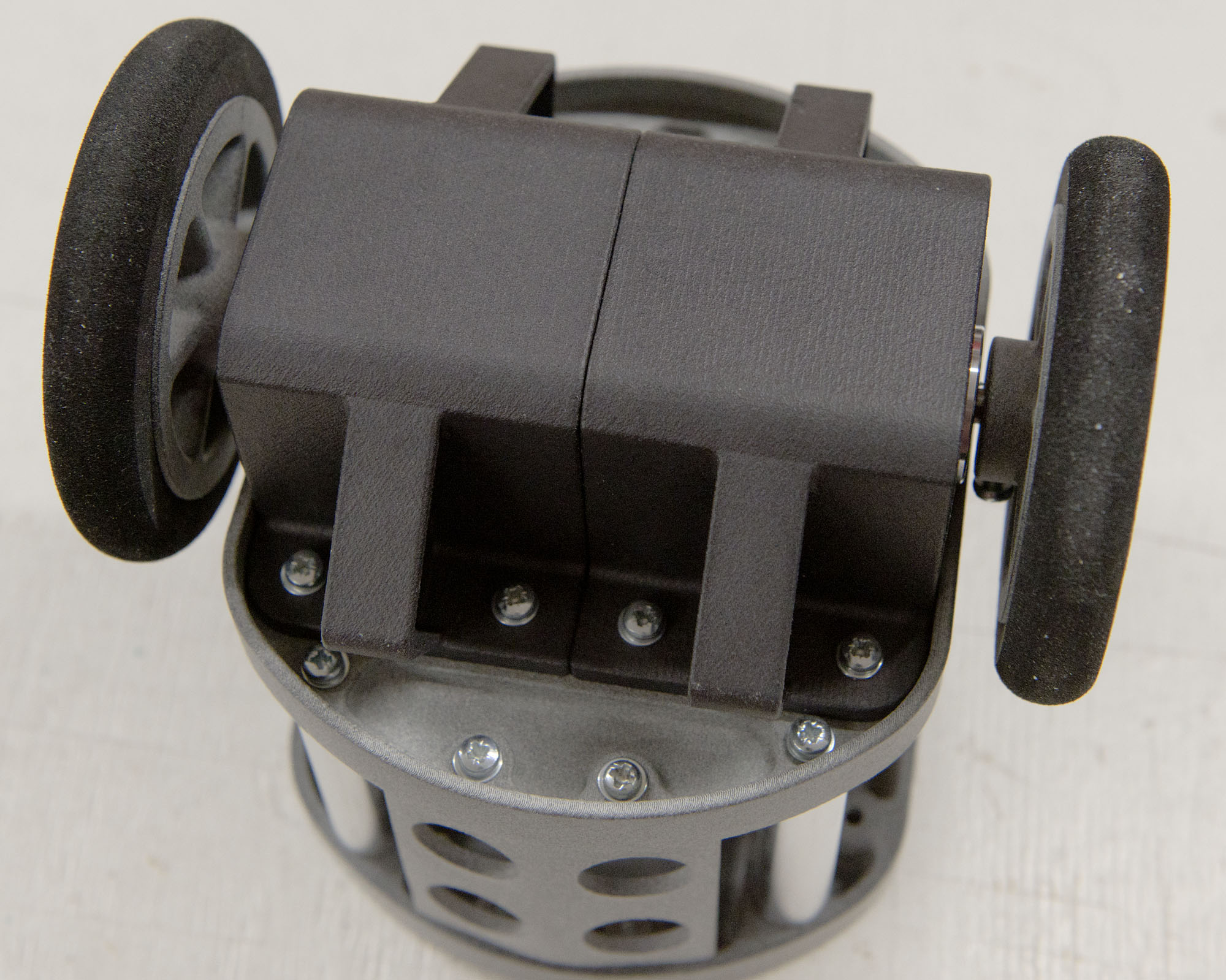
In this video, I make the chassis using 3D printed parts. The parts were sponsored by JLCPCB who 3D printed them for me. The parts are made out of PA-12 Nylon using MFJ 3D printing process. But those parts can also be printed using any standard filament printer you may have at home.
In later videos, I will make a PCB and show how I code and tune the robot. The robot will be remote-controlled, and also have an autonomous obstacle avoidance mode.
The soft foam tires used are from RC plane wheels. I got them from this Swedish RC hobby shop: https://www.mbs-rcmodels.se/hjul/lattviktshjul-76mm-11g-2-pack/ I don’t think they ship outside of Sweden, or maybe they do. Maybe it is possible to find other tires that fit. I have also included STL files for the tires in the downloads if you want to try and print them out of TPU or similar.
I made my own “multi-sensor” for the FrSky radio system. An Arduino Nano reads a few different sensors and sends all the data to the Smart-Port connector on the RC receiver. This way I can get information such as battery voltage, speed, altitude, GPS position, and temperatures on my RC Radio when I fly my RC planes. This is perfect for planes that don’t have a flight controller onboard.
I actually started experimenting with making my own telemetry sensors a few years ago. Therefore my code is actually quite old. Back then, this was the only library available. I still think it works well, but today there are also other alternatives available.
At first, I just soldered a GPS and a servo connector to an Arduino NANO. But later I made a few PCBs to make them easier to assemble. My first versions had voltage monitoring of the individual cells in the flight battery, but I found that it was annoying having to plug in the balance connector of the battery in the plane.
This is my third iteration of the board. It has a single input for LiPo battery voltage monitoring with a voltage divider and filter capacitor, a BMP280 barometer for altitude and variometer measurements, a connection for a Beitian BN-220 GPS or any other NEMA capable GPS for speed and position data, and two Dallas DS18B20 temperature sensors, one onboard and one attached with cables.
Update 2022-01-07: I fixed an error in the PCB design and made a few small adjustments in the code. The links are now the updated versions.