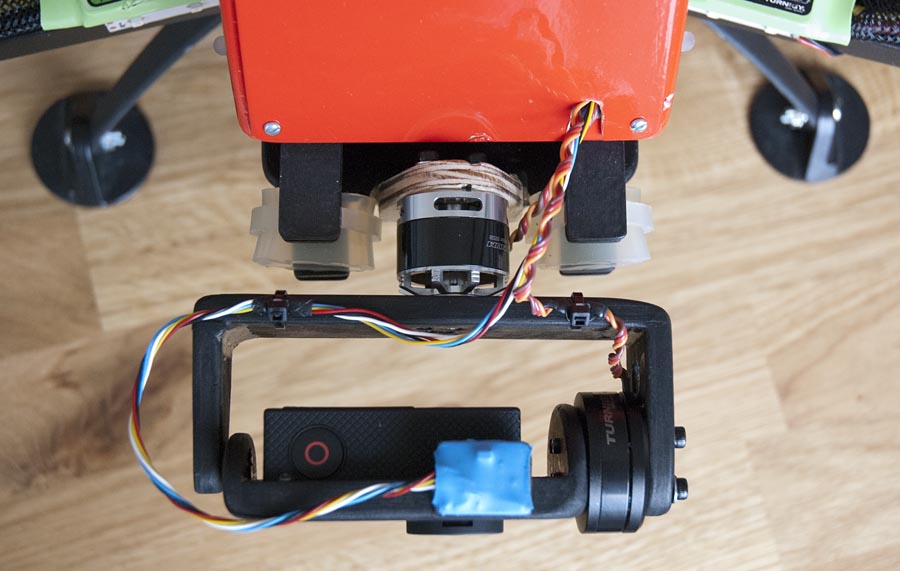
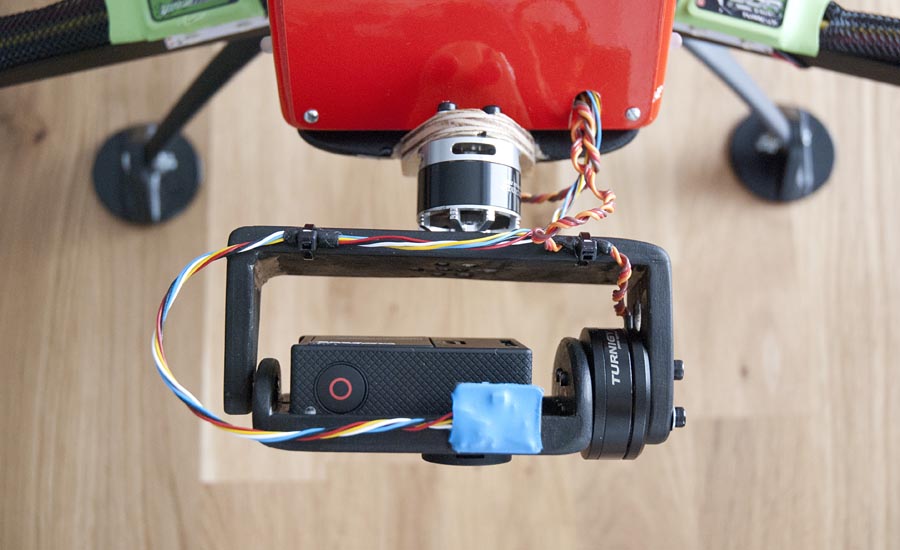
In this video I am testing a new gimbal design again. This time I have mounted the gimbal to the fuselage using silicon hoses to reduce motor vibrations. This did remove almost all vibrations. To the APM quadcopter page: APM quadcopter page

In this video I am testing a new gimbal design again. This time I have mounted the gimbal to the fuselage using silicon hoses to reduce motor vibrations. This did remove almost all vibrations. To the APM quadcopter page: APM quadcopter page
This video shows a full autonomous flight with my APM quadcopter. The flight starts with a takeoff up to 20 meters, then the quadcopter flies through 10 “spline” waypoints before returning to the launch position for an autonomous landing.
A new compilation video shot from my home built APM quadcopter. In this video I am testing a new gimbal design again. It is not perfect, there are still some vibrations. I think I need to mount the gimbal to the fuselage with some sort of rubber dampeners. The silicone hoses between the frame and the fuselage are not enough.

In update 13 a have added water to the world. The water is created using a reflection texture and a refraction texture that are applied to the water surface. The textures are distorted and animated by two DuDv maps. There are also specular light reflections on the surface, the surface normal is calculated using two normal maps.
More info here: https://axelsdiy.brinkeby.se/?page_id=1006
I wanted to do a small project in the Unity 5 game engine to learn some of the basics. This it what I came up with after around 10 hours of work.
It is a simple FPV quadcopter racing simulator. You control a small and agile quadcopter using the analog joysticks on a game-controller. A real RC simulator transmitter can also be used. It is possible to fly both in first person or in third person. There are not many quadcopter simulators or games out there, maybe it would be interesting to add more features and make this a more like a complete game/racing experience?
Download here: http://quadsim.brinkeby.se/