I have been flying a lot of FPV quadcopters this summer. In the spring I got the DJI digital FPV system. I previously used Echine EV800 box-goggles, and of course, it was a big difference. Not only is the image quality on a whole other level, the goggles themself are a lot more comfortable to where and use. This upgrade made FPV flying a lot more fun. I have been flying and training a lot. Trying to learn different freestyle moves and also flying through gates and hitting smooth resing lines. But chasing other drones and airplanes is probably what I find most interesting. Below are two videos.
In this first video I am chasing a Multiplex Solius Glider. Probably one of the easiest kinds of RC airplanes to follow. It is flying relatively slow and is large and easy to see. This video was recorded on a GoPro Hero 8 camera. 4K60 with “hyper smooth” turned on.
In this second video, I am chasing a small 5-inch quadcopter that is running INAV firmware with a GPS. It is flown FPV in position-hold mode by a 80-year-old man in my RC flying club FK Gamen. He has been flying a lot of RC planes over the years, and now he is getting into FPV quadcopters. This video was recorded using my older GoPro Hero 3 Black, which I have since sold. The new Hero 8 was a big upgrade.
A fully autonomous takeoff and landing demo. The plane is designed and scratch-built specifically to be flown by the ArduPlane system. It has large control surfaces and a landing gear with a lot of suspension travel to work well on my local flying field with is a bit bumpy. My goal with this project is to create a plane that can fly waypoint missions and takeoff and land reliably in autonomous mode. This video was recorded in September of 2020, and a will continue to experiment and improve the plane. Lidar altitude sensor and airspeed sensor is comming…
I built this plane at the beginning of 2020. I started making a few first test flights in the spring. Then in April, almost exactly one year ago, unfortunately, some technical problems caused the plane to crash. The Chinese Pixhawk-clone I was using suddenly stopped working at an altitude of about 50 meters. The plane made a steep dive at high speed into the ground. The autopilot was fried, and it probably sent out full battery voltage on the 5V-bus in the process because the GPS, airspeed-sensor and telemetry-radio also get destroyed. I have a log-file with a large current-spike happening half a second before it died, in the air. The battery, motor, ESC, and all servos survived. But It was still a major setback for the project.
Crash site after the in-air autopilot failure.Burned chinese Pixhawk-clone that suddenly stopped working in the air.
3-4 mounts later I decided to repair the plane and order new electronics for it. I am using a different Pixhawk-clone now, and I have made many successful flights with the plane. It has now logged over 10 hours in the air.
I have been experimenting with making my own LED light systems for RC planes for a while now. I first made my “RC plane hub” for one of my planes in 2019. It was a combination of a LED light system and gyro stabilization. More about that here: https://axelsdiy.brinkeby.se/?m=201911
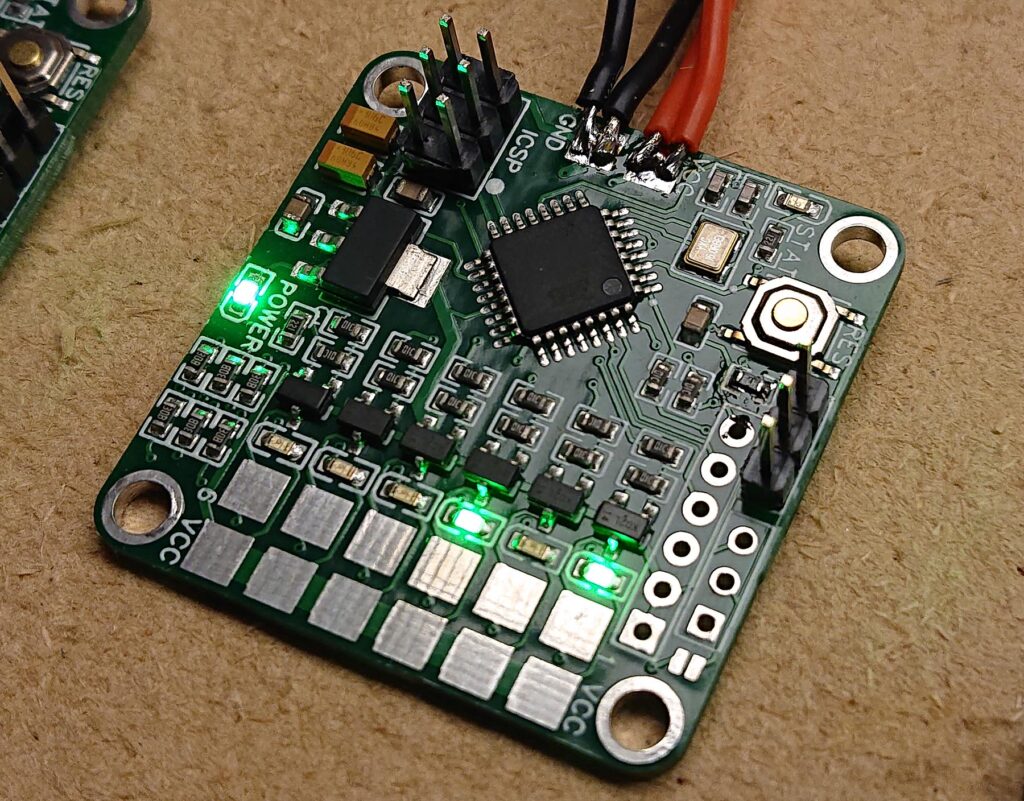
Later I wanted a small simple standalone system that could easily be installed in any plane. I first made some experiments by just connecting a couple of transistors and LEDs to an Arduino Nano. After a bit of prototyping I made a custom PCB with a ATmega328 processor and some MOSFETs for controlling the LEDs.
V1.0 of my LED controlled board.
The idea is that this board is connected to the full battery voltage of the RC plane, and the outputs are connected to the LEDs. The LEDs themselves are connected on groups of three in series with a current limiting resistor adjusted to the LED type used and the battery voltage. The ATmega328 processor (same as Arduino Uno and Nano) reads a standard servo signal and controls and flashes the LED outputs in different ways depending on the input. This alows the pilot to control the LED from the RC radio.
I usually fly my RC planes on 4 cell Li-ion batteries. They are just over 16 volts fully charged and 12 volts when discharged. This causes the LEDs to be bright at the beginning of the flight and pretty dim at the end. Therefore I usually connected one of those small switching adjustable DC-DC converter boards between the flight battery and my LED board to convert the input voltage to 12 volts. When also adjusting the current limiting resistors for the LEDs to 12 volts this works quite well.
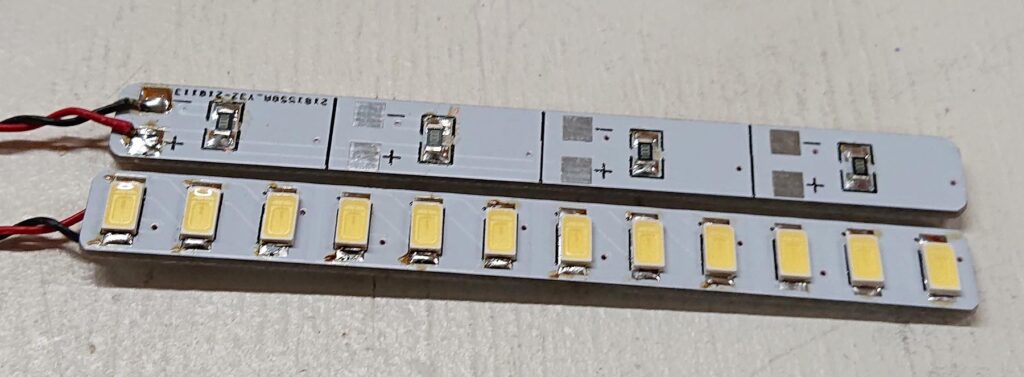
For the LEDs themself I use cold white surface mount LEDs for landing lights and strobe lights. I have made my own custom PCBs for them, as can be seen in the video above. For the colored navigation lights, I use standard 5 mm LEDs, of the brightest type I can find.
cold white surface mount LEDs for landing lights and strobe lights.
Later I made a new version of my custom LED controller board with a built-in fixed 12V switching regulator. Otherwise, it is the same processor, MOSFETs, and software as the first. I also skipped the indicator LEDs for each channel to save space on the PCB.
The new board is 60 x 25 mm. The 12V regulator can supply up to 3A to the LEDs. The MOSFETs can handle up to 3A each. Whish is a lot more than needed. The input voltage to the board can be up to 40V, or 10 li-ion cells in series. If the input voltage is lower than 12V the LEDs and the board will still work, but the LEDs will no be as bright.
Another video with more winter flying. This time with a few different airplanes. Me and a couple of friends flying at my local RC club: FK Gamen. It is actually pretty uncommon that we have this much snow here where I live. Usually, it just comes a few centimeters of snow that melts away the next day. But this time the weather was perfect. Lots of snow, low winds and sunny.
I found it interesting to experiment with different ski-designs. The planes with smaller skis struggle to stay on top of the soft snow. In the latter part of the video I have made new longer skis for my plane that work better in the soft snow.
Made a set of skis for the Bush Beast 3. This video shows the first few testflights with them.
The skis are made out of 1.5 mm plywood and covered with Oracover on the underside for low friction. I piece of 1 mm piano wire is bent around the main landing gear and makes sure the skis are oriented the right way.
Here is a video of me assembling the main electronics board used in my Bush Beast 3 RC airplane.
A Teensy microcontroller is used to read a decode an S-bus signal from the receiver and make all the servo signals. It manages servo mixing and gyro stabilization, as well as controlling LED lights on the plane.
More info about this, including schematics and code can be found on the Bush Beast 3 page here: Bush Beast 3 page
I got myself two new airplanes this summer at an RC plane auction that was organized at my local RC flying club FK Gamen.
The first one is a J3 Cub ARF model by Thunder Tiger with a wingspan of about 2.2 meters. The model came with a 4-stroke nitro engine that I have replaced with an electric power system. I will make a new landing gear with suspension and fix the motor cowling. I will probably add some kind of gyro stabilization also, this plane is surprisingly unstable in windy conditions.
The second plane is a Flair Magnatilla. The wingspan is about 1.6 meters. This is my first airplane with a nitro engine. A 4-stroke Saito. I will probably add a steerable tailwheel and make a few other adjustments over the winter.
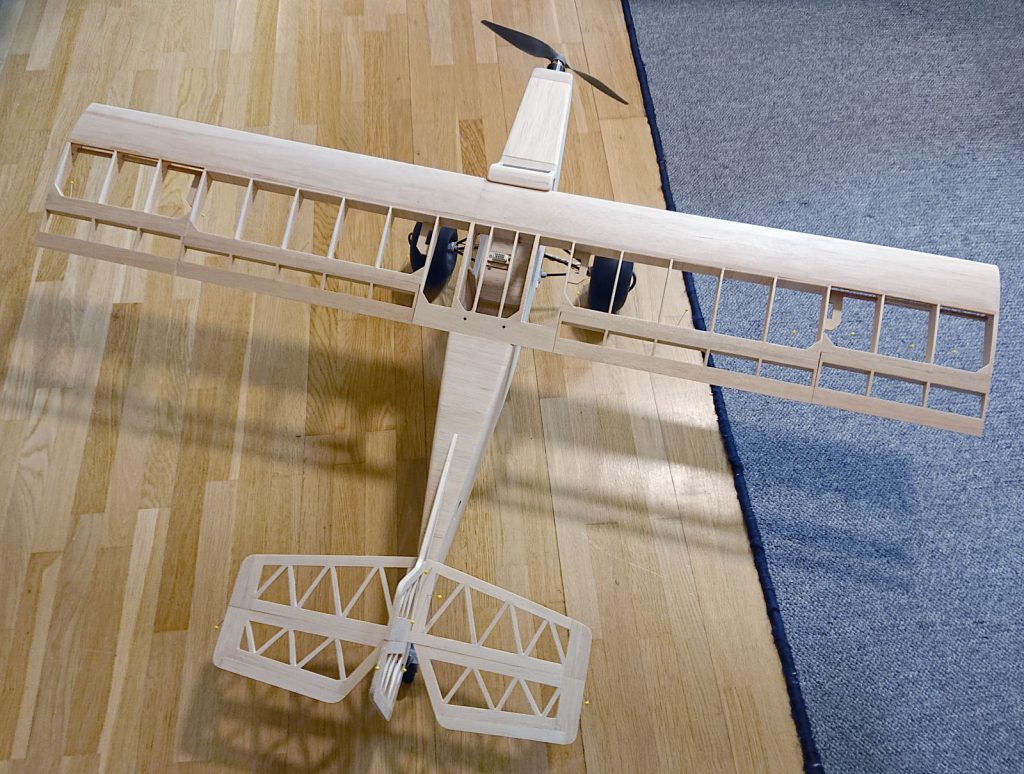
Bush Beast 3 is an RC bush plane that I have designed and built during this winter. The plane is built using balsa wood and covered with Oracover. The design of this airplane a combination of Trent Palmer’s Kitfox, the Pilatus Porter, and various Cub planes.
I have made a custom electronics system on this plane. A Teensy 3.2 microcontroller reads the S-bus signal from the RC receiver and controls all the servos, it also applies 3 axis gyro stabilization and manages all servo mixing and a custom lighting system. More about that in a future video.
I fly my RC Airplanes and quadcopters on LiPo batteries like most other people. But LiPo batteries have several disadvantages. The biggest problem is that their life is pretty short. They usually don’t last more than 100 cycles. Therefore I wanted to explore the possibility of using 18650 cells to power my RC models instead. I while ago I got myself a cheap battery spot welder from China and a couple of genuine LG HG2 cells.