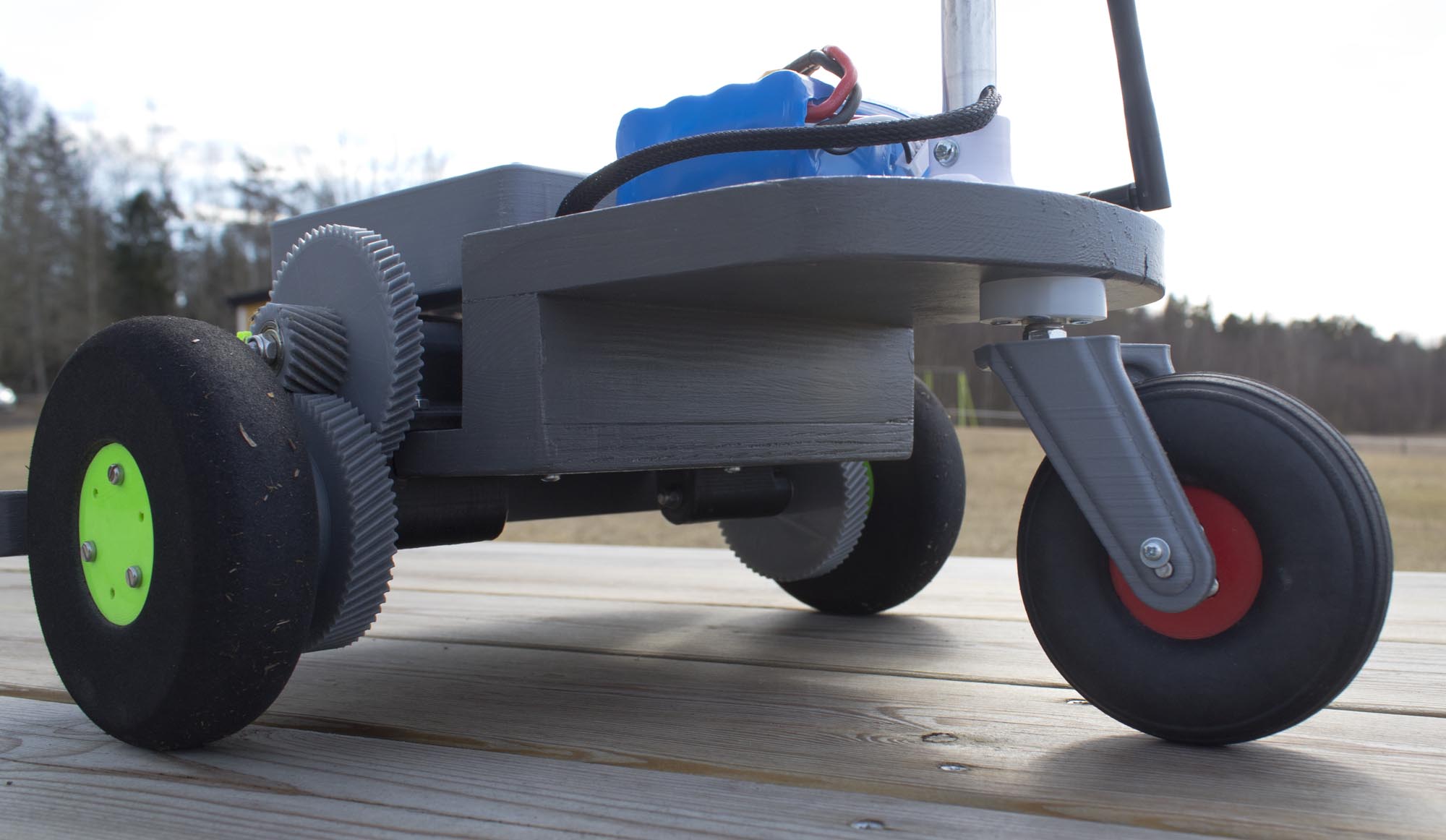
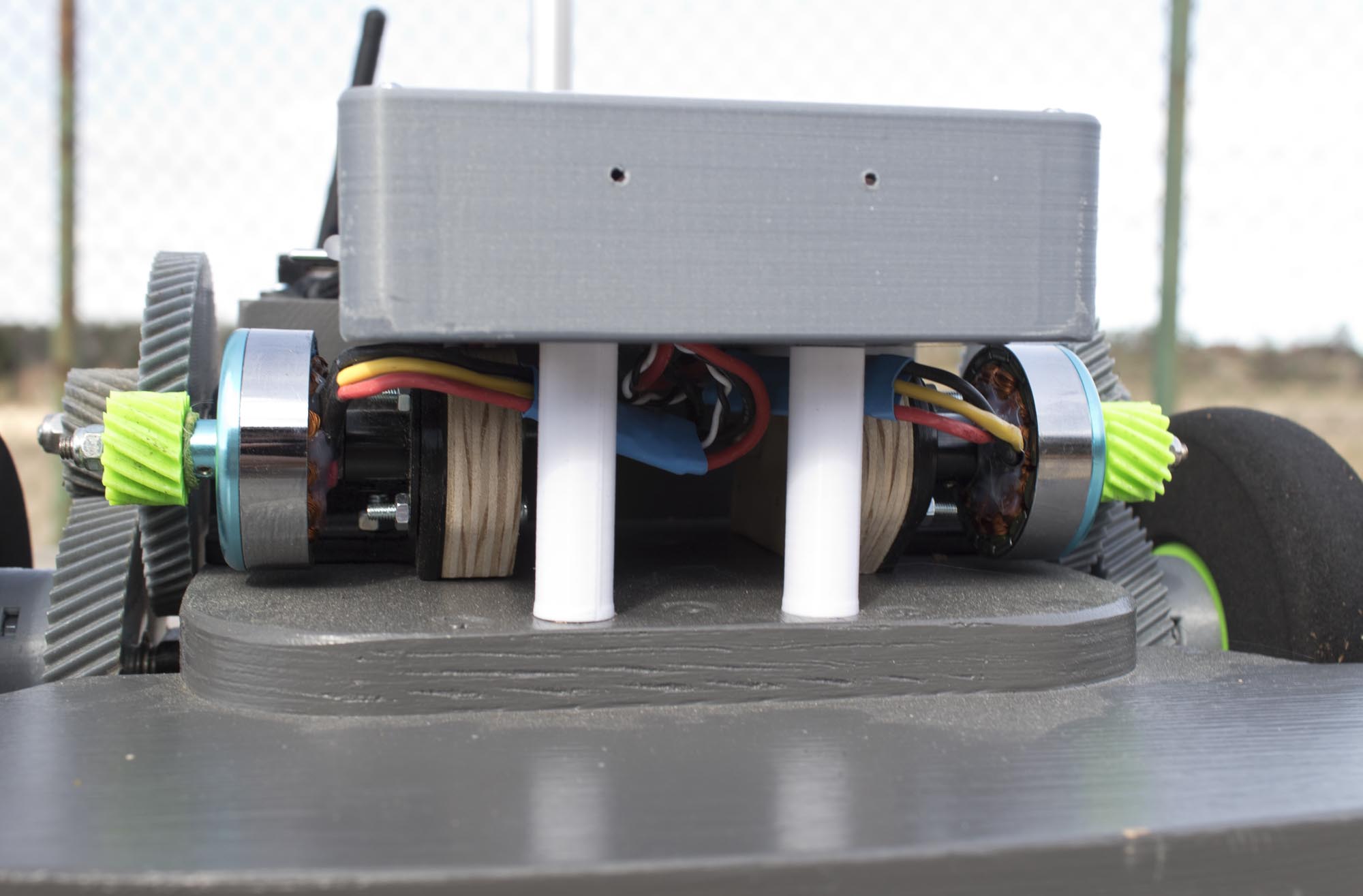
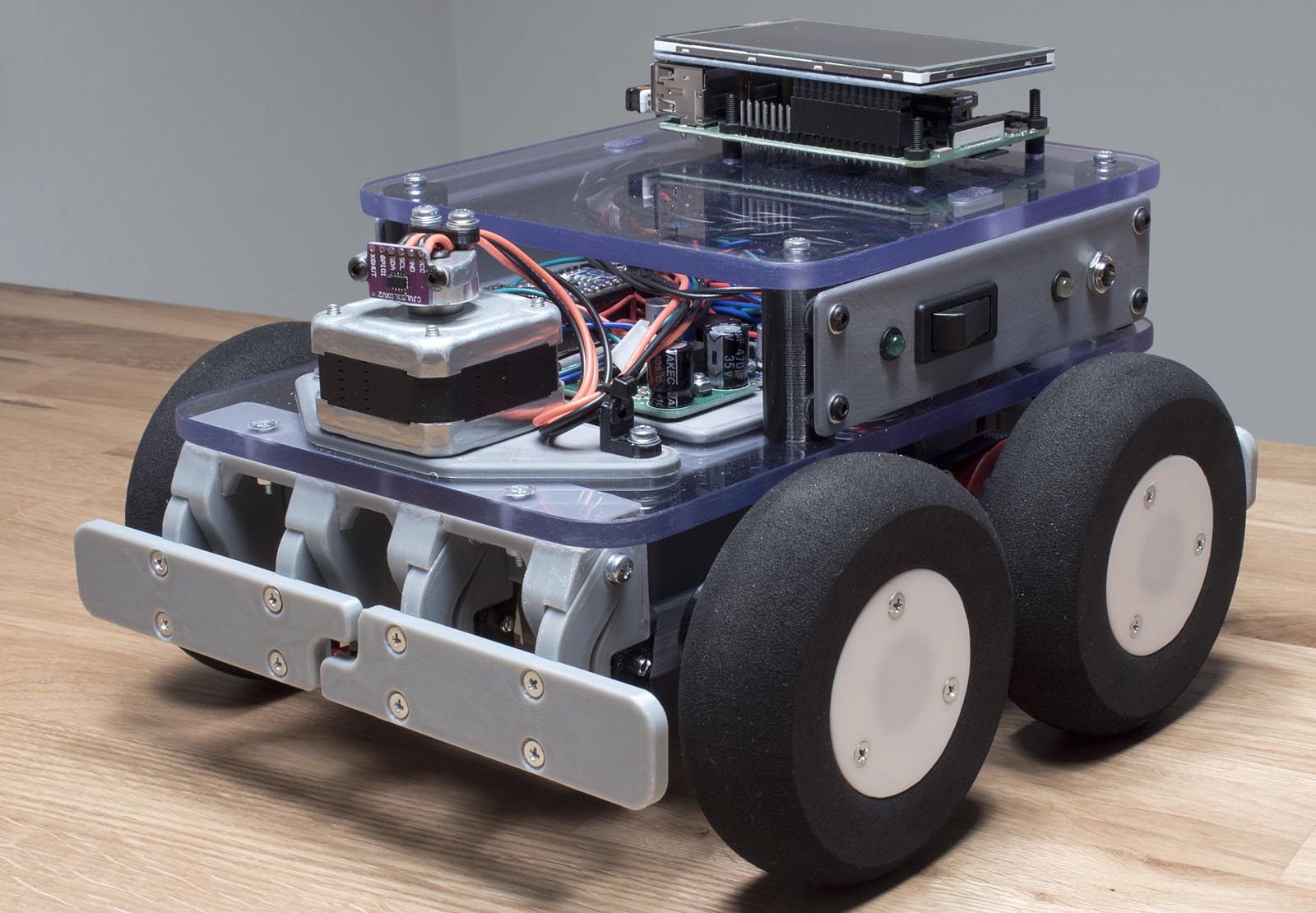
I built a robot running the ArduRover firmware. It has a differential drive system with two brushless sensorless drone motors and 3D printed gears. The video above is an overview of the robot and what it can do. The robot is built entirely to out parts I had laying around. The chassis is made out of wood and painted to make it look a bit better.
My intention was to use this robot as a base for adding sensors and other stuff and experiment with some of the features in ArduPilot/ArduRover. I later realized that I can’t do much more since this flight controller only has 1 MB or flash. Maybe I will change the flight controller in the future, or make another rover.
So far the robot has driven a total distance of about 15 km and the 3D printed gears still work well with almost no visible wear. They are printed out of standard PLA plastic.