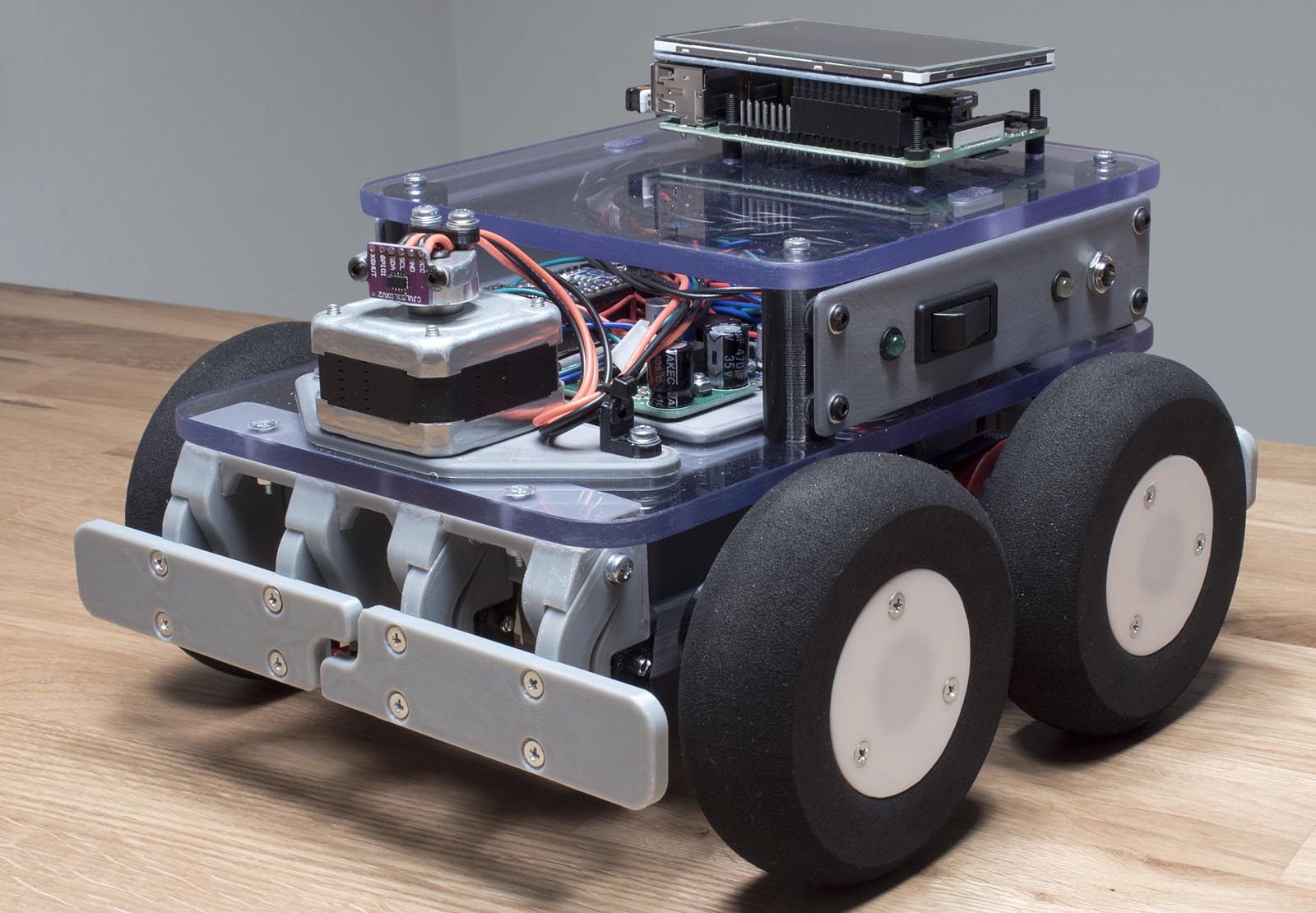
This is a new long-term robot project I have been working on for the past couple of months. It is a general purpose indoor robot, that will work as a platform for experimentation. When designing this robot, I have tried to think about and improve everything I have learned from previous robot projects I have made. But this robot will also feature some new stuff I have not tried before. Some of the key features if the robot includes:
- Stepper motor based four-wheel-drive skid-steering drive system
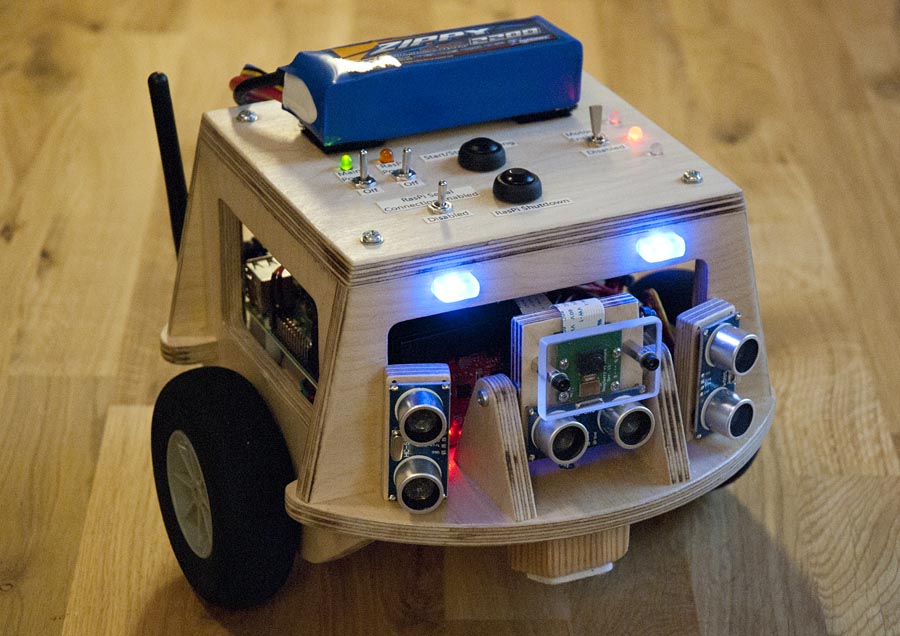
- Big Li-Ion battery
- A lot of custom 3D printed parts
- Heavy duty bumpers, large ground clearance and large foam wheels
- Raspberry Pi main computer
- Arduino Due for controlling low-level peripherals
- Scanning Lidar sensor
- Probably a Raspberry Pi camera module mounted on a pan/tilt system
So far, only the majority of the mechanical work is done. Here are a few images, click on them to make them larger: