At the beginning of 2024, I built a new VTOL plane. I always intended to make a better plane using what I learned from building the first experimental one.
This new VTOL plane is made from traditional balsawood construction. The proportions are roughly the same. Wingspan is slightly larger. The airframe is more rigid.
This video was filmed in the spring of 2024. The plane did have some problems: It barely had enough thrust to hover, and there were also compass problems. Because of this, I did not fly it very much during 2024. It flew great, but it did not feel very reliable.
The plane is now being modified and improved for the next flying season. My intention now is to fly the aircraft on a 6S LiPo battery instead of the two 4S Li-Ion batteries I used before. This will give it a lot more trust during hovering, which also improves control and reliability. To do this, I need to replace the propulsion motor and ESC. I will probably also need to move the compass. It is mounted in the front of the fuselage now, and the high current in the battery cables nearby is a problem, even with calibrated current compensation for the compass.
Here is a video of a Vertical TakeOff and Landing airplane I built using the ArduPilot software. This is a fast prototype build using cheap materials to test the concept and learn as much as possible about ArduPilot quadplanes and this kind of aircraft in general. I intend to build a better and more capable VTOL plane in the future with what I learn from this.
This plane was built in around 3 veeks from start to finnish. Using mostly depron foam and som wooden parts. The tail-booms and wign spars are made out of wood. I used a Mateksys H743-WING V3 flight controller running ArduPlane. To this a have connectad a Mateksys AP_Periph CAN node with a M10Q GPS with compass and an ASPD-4525 digital airspeed sensor. Using a CAN-node for this was not necessary here, but I wanted to try it to learn about it. The lift motors are of “cine-lifter size”, spinning 8-inch 3-blade propellers, and driven by a 4in1 BLheli32 ESC. The propulsion motor is a slightly to powerful Emax I had laying around. I also used old servos I hade laying around, and a split elevator control surface for redundancy.
I noticed on the first test hover that I had very bad yaw control. It was almost impossible to point the nose of the plane in the direction I wanted. After this, I tried to angle the motors and this worked great. It is still not as agile as a normal quadcopter, but controllable enough. Quadplanes often have sluggish yaw control because of there large moment of inertia compared to normal quadcopters.
I built a solar-powered catamaran. This is a project I made together with a friend. He also built his own boat with a similar design. We made the boat hulls together and then did our own implementations of the same basic idea. We also used a lot of parts we had laying around, including motors, ESCs, propellers, and old drone flight controllers running ArduRover software for autonomous GPS navigation.
The boats have a 60W solar panel that charges a small LiFePo4 battery that is then used to power the motors and electronics. My Boat uses a cheap PWM charge controller to charge the battery. It turned out that It was fairly easy to make a boat that is powered only by the sun. During our first test run, the boats consumed more than twice the energy that can be stored in the batteries, and the batteries were kept fully charged all the time by the sun.
The video above shows the first test runs. I made a few simple old RC boats before, but I don’t have much experience with boats. After this first test run and I already know a lot of things that can be improved and changed. I will continue to work on this project, mostly to try and improve the boat design to make it sail with more control, both in straight lines and during turns.
I built a new ArduPlane aircraft. It is a balsa airframe I designed and built for more experimentation with autonomous flight. I have taken everything a learned while building and flying my previous autonomous plane, the “ArduPlane 2020”, and tried to improve it. See more about the previous plane here on this page.
This new plane is slightly larger and more efficient than the previous one. This one glides better and is also more controllable. The control surfaces are larger and can move more. It also has dual elevators with individual servos for redundancy. This plane can also carry small payloads or bigger batteries for longer flight time.
Showcase video of my custom-built DIY solar plane. This was recorded in late July 2022, a few weeks after that last video. Here the plane is flying autonomously using only power from solar cells on the wings. The solar cells generate up to 75W, but only 55W is needed to sustain flight.
Here is a video of the first test flights I made with the solar plane. This is only flying on battery power. More videos including solar-powered flights are coming…
This is a new project I have been working on for the last couple of mounts. A solar power autonomous plane. My goal with this project is to make a plane that is capable of sustaining powered flight using solar power.
My plane is scratch-built for the purpose of being a solar plane. Completely my own design. It has a large wing area for mounting solar cells and is relatively lightweight. The wing is built with depron and a wooden wing spar. It has a flat bottom wing profile that is similar to the classic Clark Y. The fuselage is built using balsa wood, and a fiberglass fishing pole as the tail boom. The wingspan is 2.5 meters. Total flying weight without solar sells is exactly 2 Kg, with gives a wing loading of about 24 grams per square decimeter.
The plane is using a 750 KV drone motor spinning a 13 inch propeller. This is powered by a 4-cell Li-Ion battery made of Samsung 50E 21700 cells. I am using a Mateksys 765 wing flight controller running the ArduPlane software. The plane is capable of flying GPS waypoint missions fully autonomously. There is also an airspeed sensor with a pitot tube mounted in the wing for improved speed control, and therefore improved efficiency.
I have not yet installed the solar cells on the wing. I wanted to do some flight testing first, since the solar cells are fragile and expensive. The plane is very efficient. In calm wind conditions the plane consumed 1730 mAh while cruising at 10 m/s at a constant altitude for 45 minutes. This results in an average consumption of about 2.3 Amps or about 35 Watts. Power consumption is slightly higher in windy conditions. The added weight of the solar cells on the wing will also increase power consumption slightly.
I will be using 36 Sunpower Flexible 5×5 E60 cells on the wings. The theoretical maximum power output is about 130 W, but the actual power output will be less than that. I will also be using a Genasun GV-5 charge controller that has a maximum power output of 75 W.
Cruising autonomously into the sunset at 10m/s and 50 meter altitudeA laptop running Missionplanner is used as the groundstationDIY dipole antenna for the 433 MHz telemetry link to the ground station. Good antennas are necessary to achieve a reasonable range with only 25 mW power, which is the maximum allowed here in Sweden.
This video shows how the Smart RTL mode works with my ArduRover-based GPS navigation robot. The robot is capable of backtracking the path to the starting position. The robot also optimizes the path to be as short as possible, removing unnecessary loops and such.
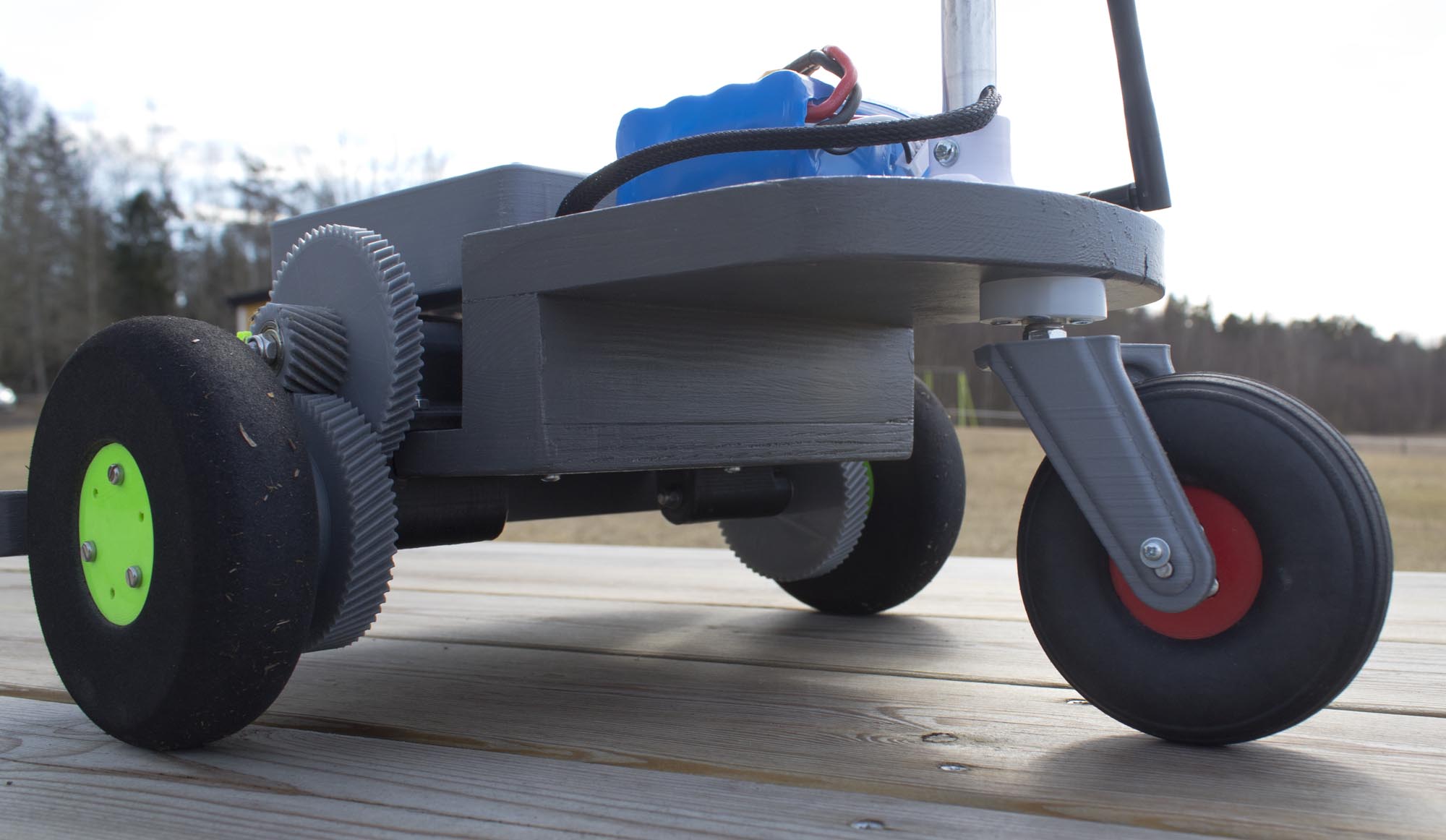
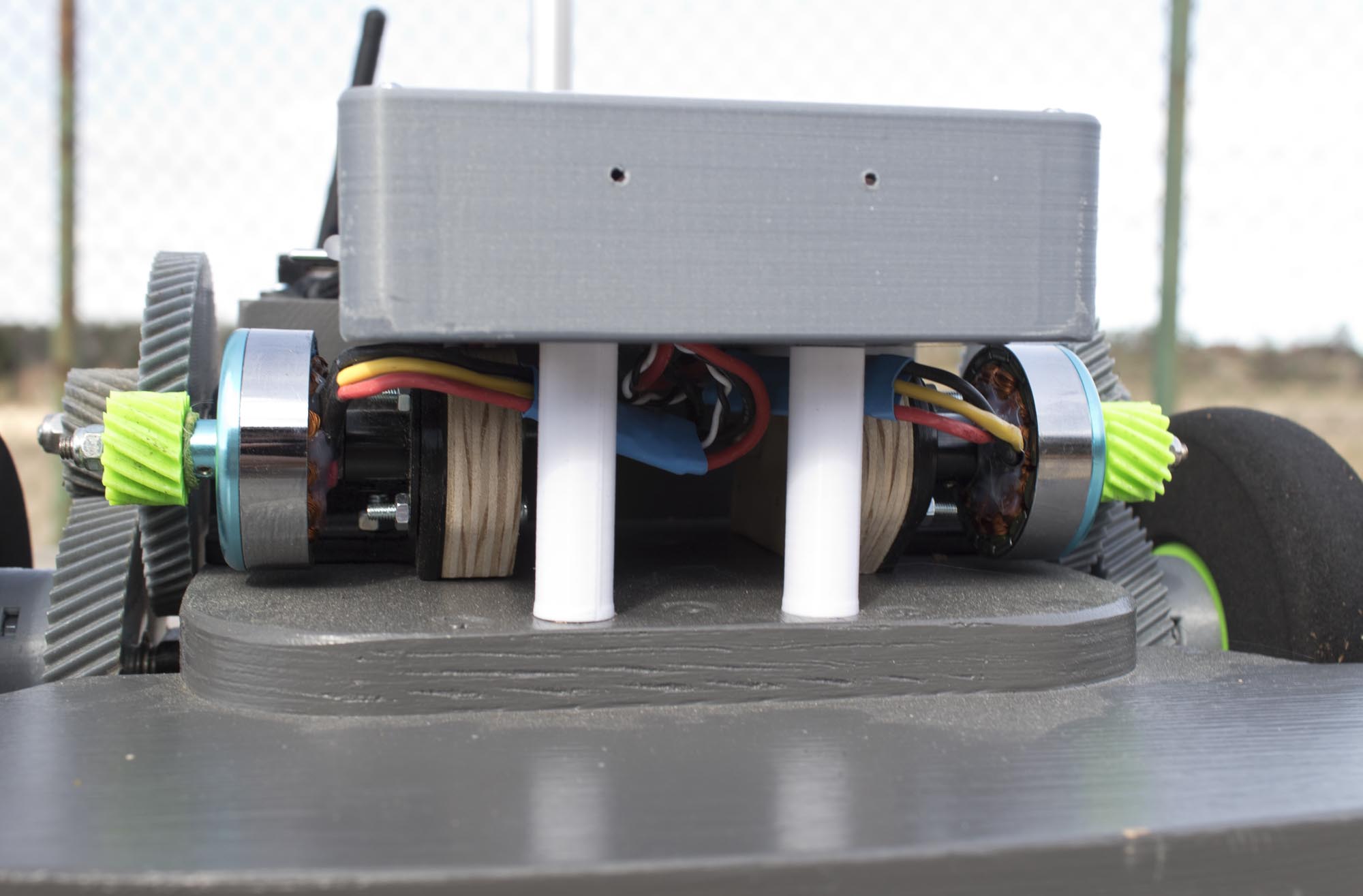
I built a robot running the ArduRover firmware. It has a differential drive system with two brushless sensorless drone motors and 3D printed gears. The video above is an overview of the robot and what it can do. The robot is built entirely to out parts I had laying around. The chassis is made out of wood and painted to make it look a bit better.
My intention was to use this robot as a base for adding sensors and other stuff and experiment with some of the features in ArduPilot/ArduRover. I later realized that I can’t do much more since this flight controller only has 1 MB or flash. Maybe I will change the flight controller in the future, or make another rover.
So far the robot has driven a total distance of about 15 km and the 3D printed gears still work well with almost no visible wear. They are printed out of standard PLA plastic.
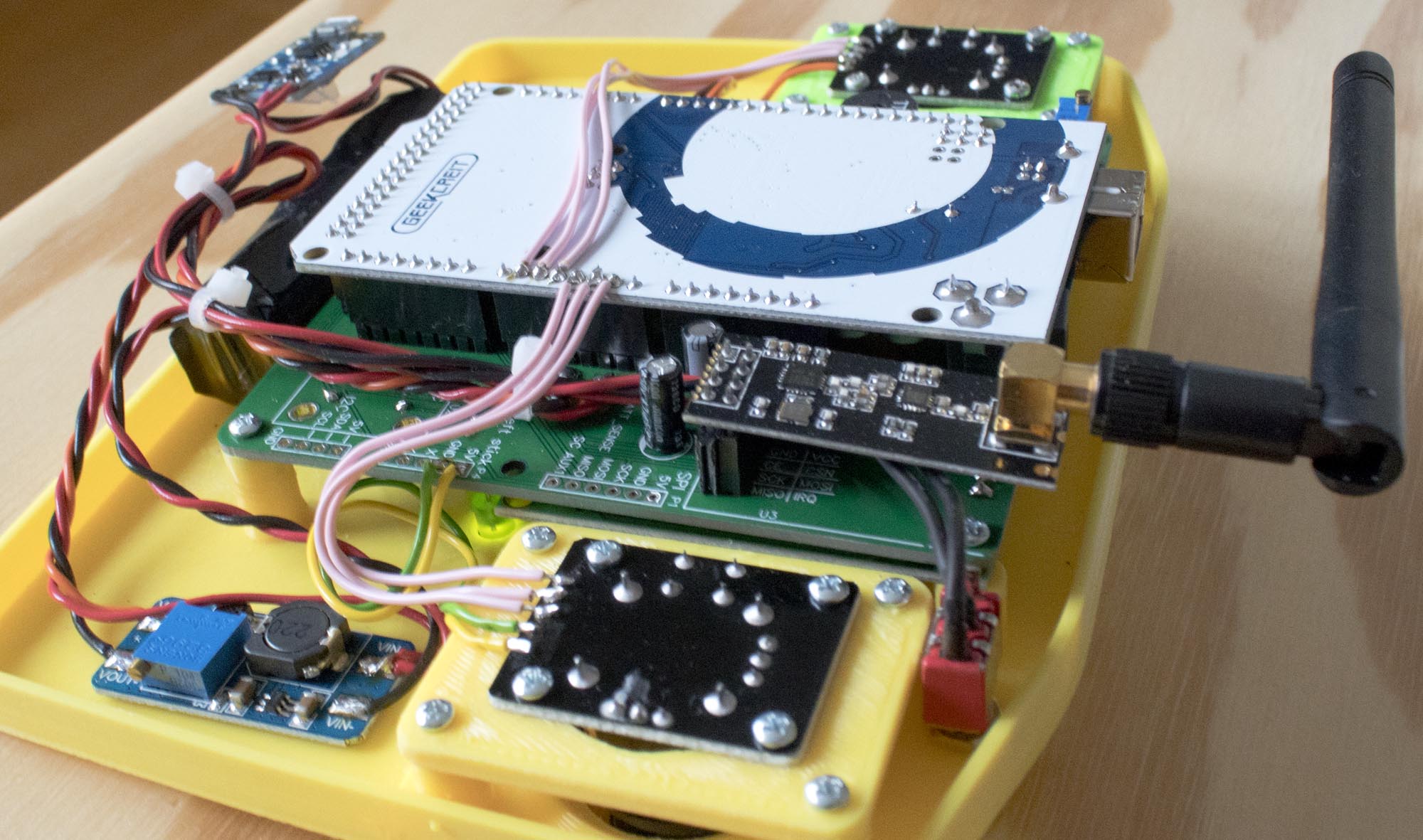
I made a new version of the mainboard in the balancing robot, fixing all the problems with the previous one. I also got the prototype of the remote controller working. It is sending the X and Y values of the control stick to the robot. The robot is then adjusting its speed setpoint and turning variable based on those values.
The RC input probably needs some filtering. Now I just use the values directly, and if the user does to fast movements there is a risk that the robot falls over.
I am not satisfied with the remote yet. The biggest problem is the controls sticks I chose to use. They are really bad since only a small part around the center of each axis can be used as shown in the video. This makes it hard to control the robot with precision. I will probably redesign the remote to use a real control stick from an RC controller instead.
I have also planned to make the user interface on the remote for adjusting PID values and other parameters in the robot. This is the main reason why it has a display. More about that in a future video.
I have also installed two ultrasonic rangefinder sensors. They will be used for obstacle avoidance in the future, but I will finish the remote controller first.